

在恶劣的天气条件下,尤其是雾天和雾霾天气,交通标志和路况信息的识别变得极具挑战性,这对交通安全构成了重大威胁。近年来,随着人工智能和深度学习技术的迅速发展,基于计算机视觉的自动驾驶和智能交通系统得到了广泛关注和应用。然而,在低能见度环境中,现有的交通标志识别技术往往难以达到理想的准确率。因此,针对这一问题,本文提出了一种基于深度学习的交通识别系统,旨在提高雾天和雾霾天气下的交通场景识别能力。
项目信息
编号:MDV-10
大小:14M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
在恶劣的天气条件下,尤其是雾天和雾霾天气,交通标志和路况信息的识别变得极具挑战性,这对交通安全构成了重大威胁。近年来,随着人工智能和深度学习技术的迅速发展,基于计算机视觉的自动驾驶和智能交通系统得到了广泛关注和应用。然而,在低能见度环境中,现有的交通标志识别技术往往难以达到理想的准确率。因此,针对这一问题,本文提出了一种基于深度学习的交通识别系统,旨在提高雾天和雾霾天气下的交通场景识别能力。
该系统采用先进的图像增强技术,如全局直方图均衡化去雾算法,以改善低对比度和模糊图像的质量,确保在恶劣天气条件下仍能有效提取交通标志的特征。图像增强模块通过去除雾霾、增强对比度和细节,使得交通标志和路况信息更加清晰可见,为后续的识别步骤提供了高质量的输入数据。此外,本文采用了BP神经网络对经过预处理的交通标志图像进行分类,从而实现对指示类、禁止类和警示类交通标志的高效识别。
为验证该系统的有效性,本文构建了一个包含多种天气条件下交通场景的综合数据集,涵盖了近五年来采集的真实交通图像数据。通过在不同能见度环境下的实验测试,结果表明,所提出的系统在雾霾环境中具有显著的识别性能,较传统的识别方法取得了更高的准确率和鲁棒性。特别是在复杂的交通场景下,本文方法展现了良好的适应能力和泛化性能。
结合近年来智能交通系统的发展趋势,本研究不仅展示了深度学习在恶劣天气交通标志识别中的应用潜力,还为未来的自动驾驶技术和智能城市交通管理提供了技术参考。实验结果表明,本系统能够有效提高雾霾环境中的交通安全性,有望在未来的交通安全保障和自动化交通管理系统中得到广泛应用。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
– 项目文档:写作流程
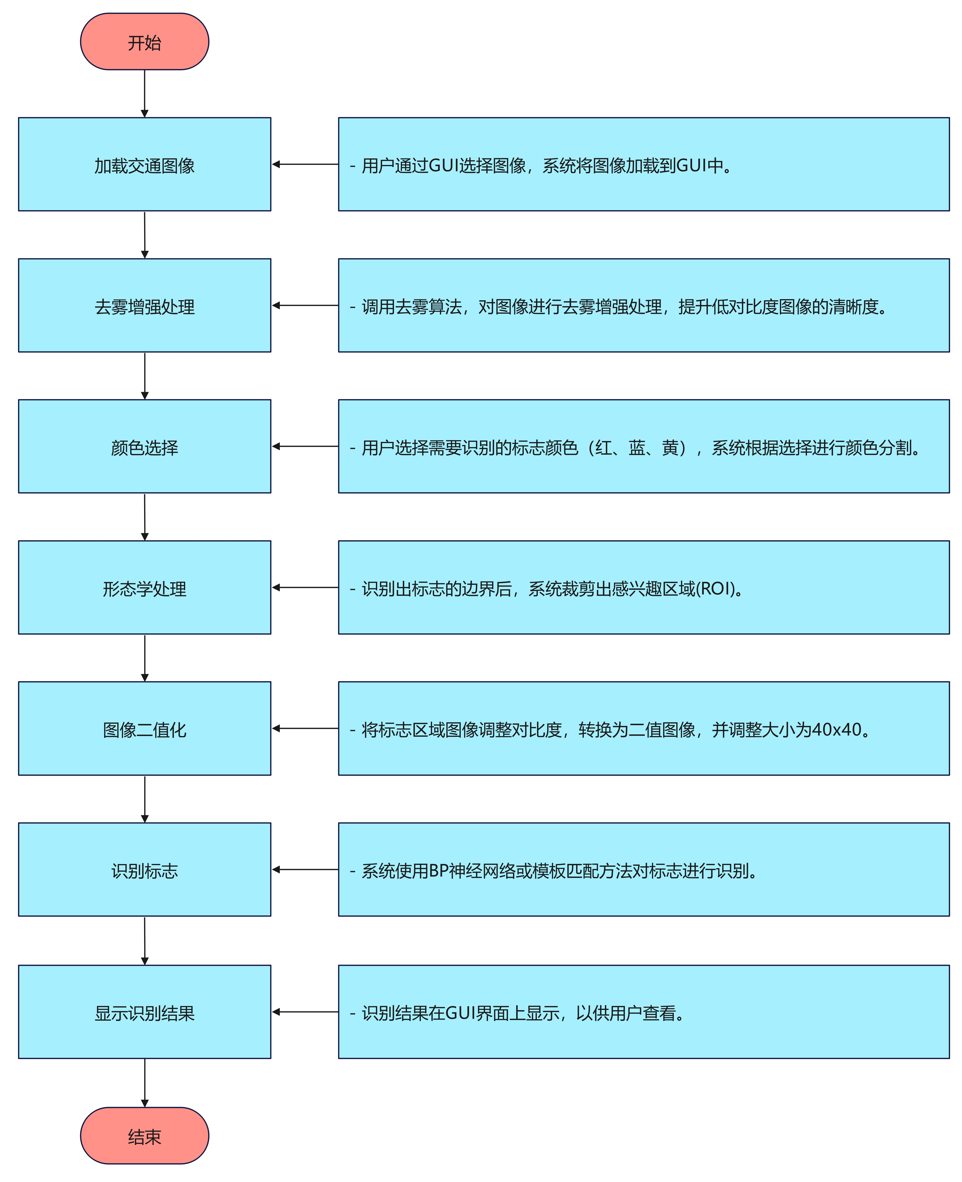
算法流程
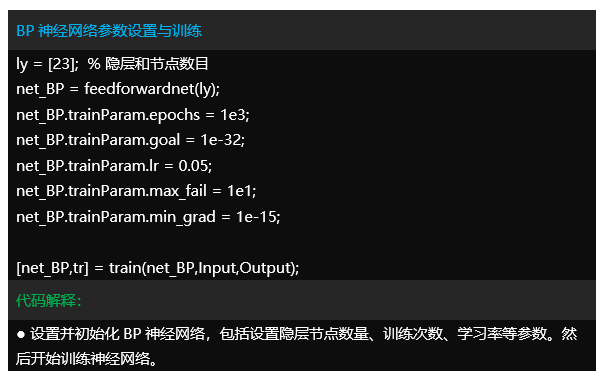
代码讲解
Tipps:仅对BPNet.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 Traffic_Iden.m
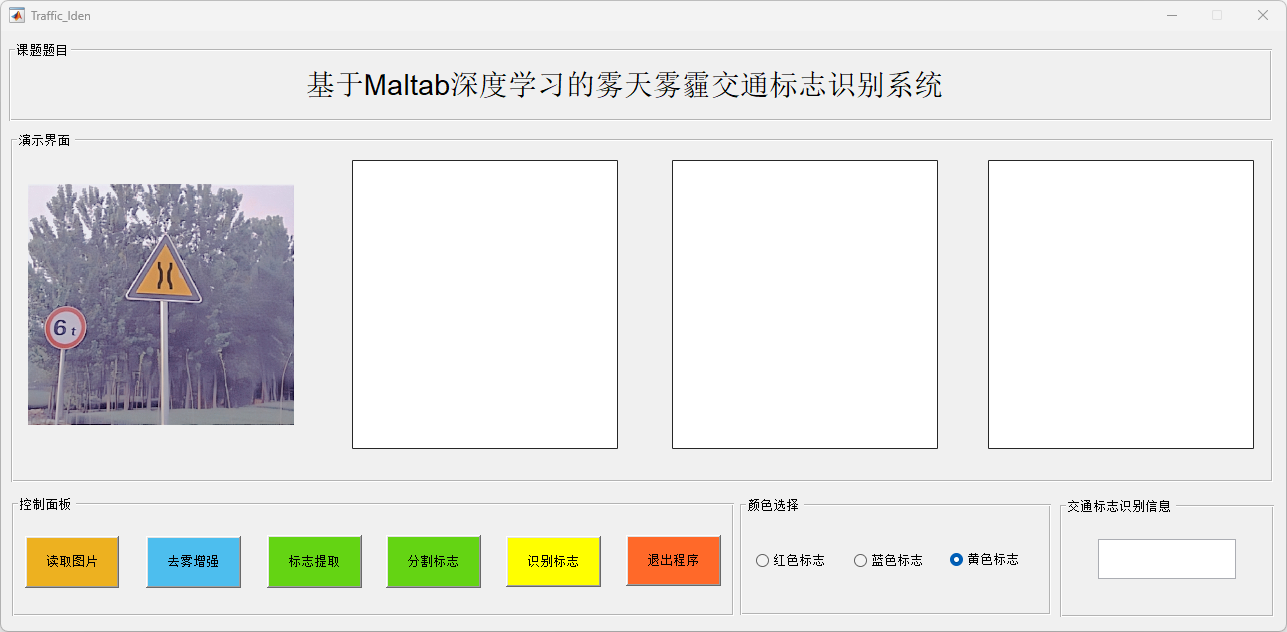
1.主界面
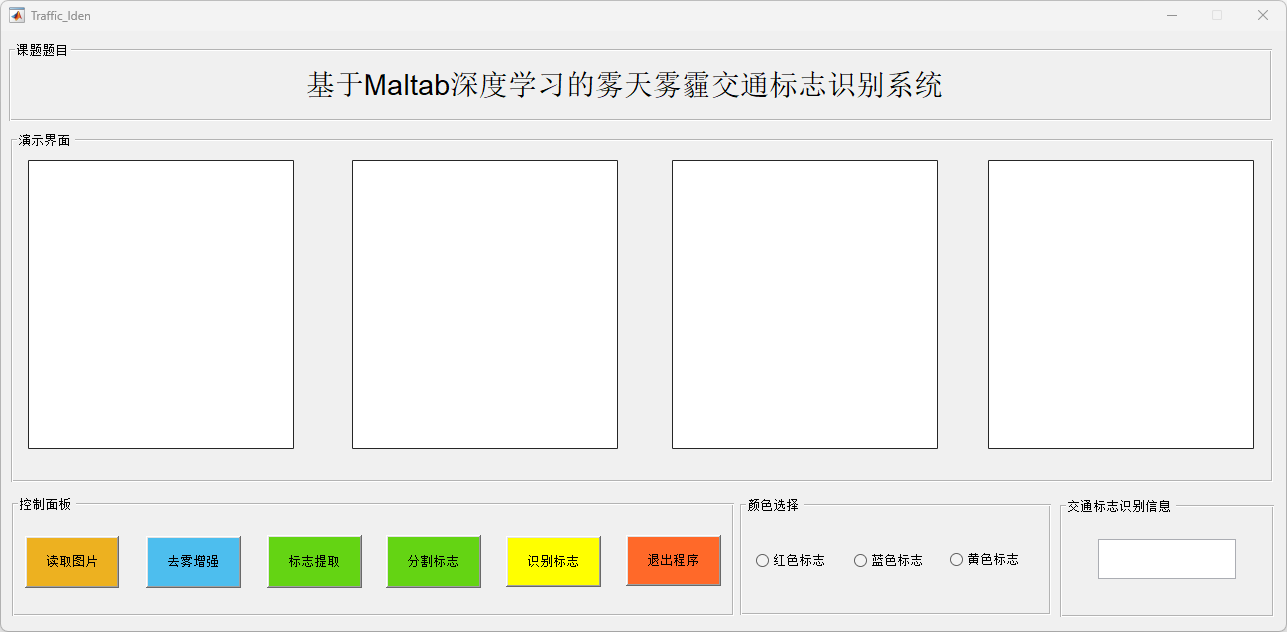
(1)系统的初始主界面,包括“读取图片”、“去雾增强”、“标志提取”、“分割标志”、“识别标志”等功能按钮。
(2)用户可通过选择不同的按钮执行相应的操作,并选择需要识别的标志颜色(红色、蓝色、黄色)。
2.去雾增强
(1)执行“去雾增强”功能后显示的图像。该功能使用去雾算法提高了图像清晰度,便于后续的标志提取和识别。
(2)在去雾后的图像中,交通标志的细节更加清晰,特别是在低能见度的环境下效果明显。
3.标志提取

(1)“标志提取”步骤展示了对图像的灰度处理和二值化处理,用于分离交通标志区域。
(2)该步骤利用颜色过滤器将感兴趣的标志从背景中提取出来,以便于后续的分割和识别。
4.分割标志

(1)“分割标志”步骤通过形态学处理(如膨胀、腐蚀)将提取出的标志区域进一步分割,提取出单独的标志区域。
(2)分割后的图像更加聚焦于特定的交通标志,去除了周围的噪声。
5.识别黄色标志

(1)系统识别黄色标志的结果。识别后的标志在界面中显示,并在“交通标志识别信息”区域显示识别结果。
(2)例如,该图像可能识别出“窄桥”或其他黄色警示标志。
6.识别红色标志

(1)系统识别红色标志的结果,显示了提取出的红色禁止标志,并在右下角显示了识别结果。
(2)例如,该图像可能识别出“禁止停车”或其他红色禁止标志。
7.识别蓝色标志

(1)系统识别蓝色标志的结果,显示了提取出的蓝色指示标志,并在右下角显示识别结果。
(2)例如,该图像可能识别出“向右转弯”或其他蓝色指示标志。
流程总结:
通过以上各步骤,系统从图像读取开始,逐步执行去雾增强、颜色提取、形态学分割,最后进行深度学习模型识别,输出相应的交通标志信息。
每个步骤都在GUI界面中实时显示,便于用户观察每一步的处理结果和识别情况。
运行 TrainBP.m
这些图片展示了使用MATLAB进行BP神经网络训练和交通标志识别的过程和结果。
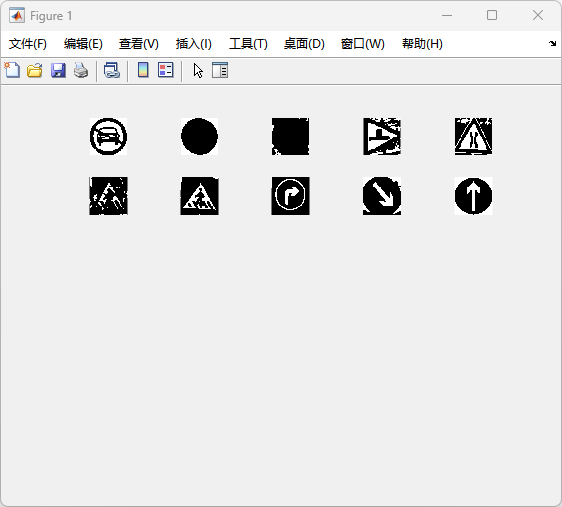
显示了经过处理后的交通标志图像的二值化结果。不同的交通标志图像被转换为二值图像,以便进行特征提取和分类。
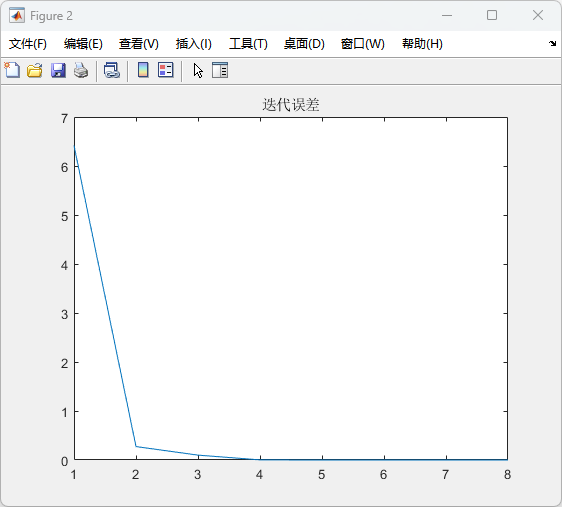
这是BP神经网络训练过程中误差下降的图表。图表显示,随着训练代数的增加,误差迅速下降,表明网络正在逐渐学习并改进。
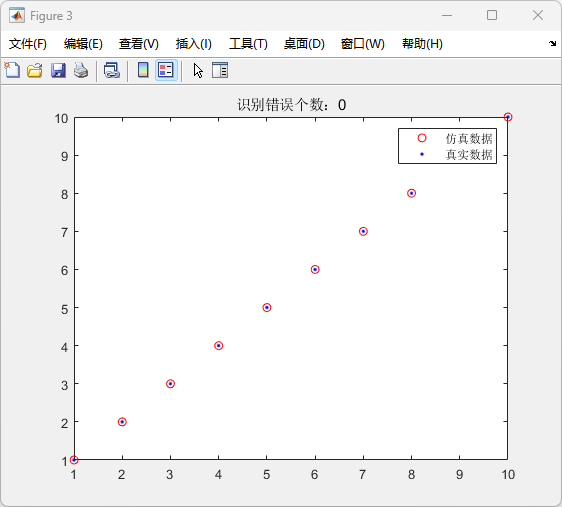
该图表展示了神经网络识别的结果与实际数据的对比。图中的数据点标示了模拟数据与真实数据之间的对比,表明识别的准确度。
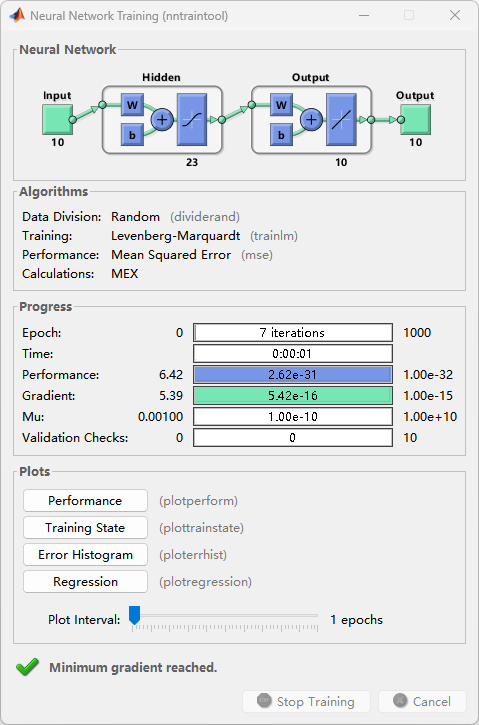
这是MATLAB神经网络工具箱中的一个典型训练界面。它展示了网络的结构(输入层、隐藏层和输出层的神经元数量)、训练算法(如Levenberg-Marquardt)、误差计算方法(均方误差MSE)以及训练过程中一些关键参数(如误差、梯度、迭代次数等)。图中显示,经过7次迭代,训练误差已经降到非常小的值,说明神经网络已经达到了最小误差并完成了训练。
这些图像共同展示了基于BP神经网络的交通标志识别系统的工作流程,从图像预处理到神经网络的训练和最终的识别结果。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
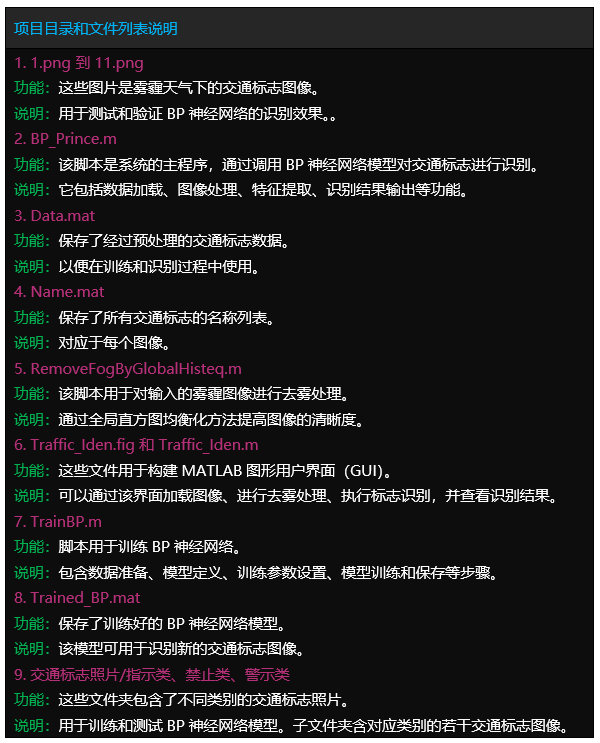
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)