

本研究提出了一种基于内河电子图的路径规划方法,旨在提高内河航行的安全性和效率。该方法采用A*算法作为核心算法,通过对内河电子图进行栅格化处理,实现对水道障碍物的有效避让。
项目信息
编号:MOG-38
大小:1.73M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
本研究提出了一种基于内河电子图的路径规划方法,旨在提高内河航行的安全性和效率。该方法采用A*算法作为核心算法,通过对内河电子图进行栅格化处理,实现对水道障碍物的有效避让。文中详细描述了路径规划的具体流程,包括启发函数的设计、开闭集的管理以及路径的生成。实验结果表明,该方法能够在复杂的内河环境中快速生成最优路径,具有较强的实用性和鲁棒性。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
– 项目文档:写作流程
算法流程
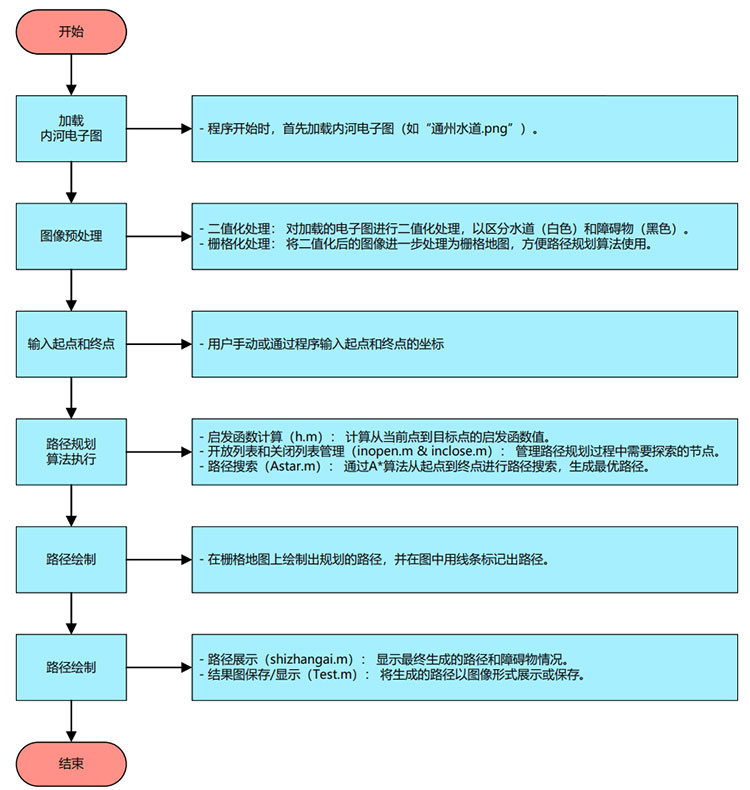
仿真共分为两个部分:
(1)使用MATLAB建立长江电子航道图的栅格模型;
(2)使用MATLAB编制基于A*算法的全局路径规划算法程序,实现对障碍物的避碰,以及对航行路径的规划。
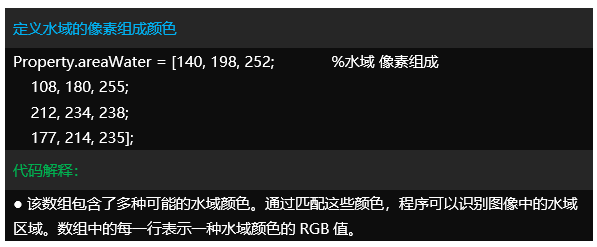
使用长江电子航道图获取长江南通水道至白茆沙水道附近水域的障碍物信息,建立Rasterize.m文件实现对地图进行栅格化处理。栅格模型的建立分为三个步骤,首先对地图进行剪裁,然后进行二值化,最后进行自由栅格的判定。建立好的栅格地图中白色栅格代表可航行区域,黑色栅格代表障碍物区域。
在对A*算法进行仿真时,本文主要建立了main.m及Astar.m文件。其中main.m文件的主要实现功能是对起始点、目标点等基本信息的设定,最后对航行距离的计算以及对路径的输出;Astar.m 文件则是A*算法的主体程序。
将初始信息设置好后,main.m调用shizhangai函数对栅格中的障碍物信息进行判断,然后将障碍物信息及栅格地图信息发送给Astar函数。Astar.m中建立了open列表和close列表用于存放待搜索的节点及路径的估计代价值f。首先将起始点坐标放入open列表,g值为0,将起始点的临近坐标放入next集合中。首先判断open列表中的点是否为目标点,若是则将该点放入close列表,结束算法并输出路径;若不是则将该前点的临近节点放入open列表中,若临近节点中存在障碍物则放入close列表中,同时将当前点放入close列表。然后计算open列表中估计代价值f,将f值最小的点作为下一步要搜索的节点。如此循环,直至找到目标点。找到目标点后将close集合中的数据传送到path集合中,最后调用plot函数画出路径。
代码讲解
Tipps:仅对test.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行完Test.m 后 执行 main.m可看路径规划。
原图(图1)
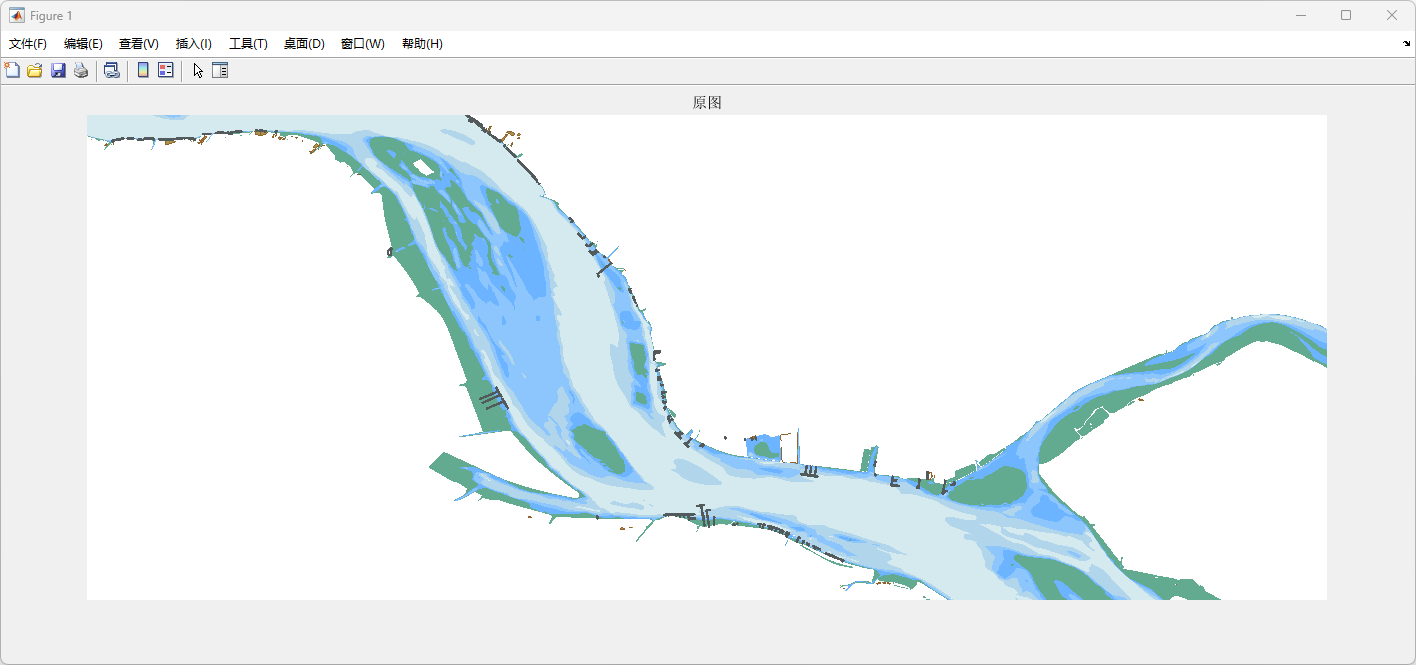
分析:这是一张内河水道的电子地图,展示了该水道的实际地形与河道。此图用于路径规划的基础输入数据,包含了河道的宽度、转弯点、障碍物等信息。
二值化(图2)
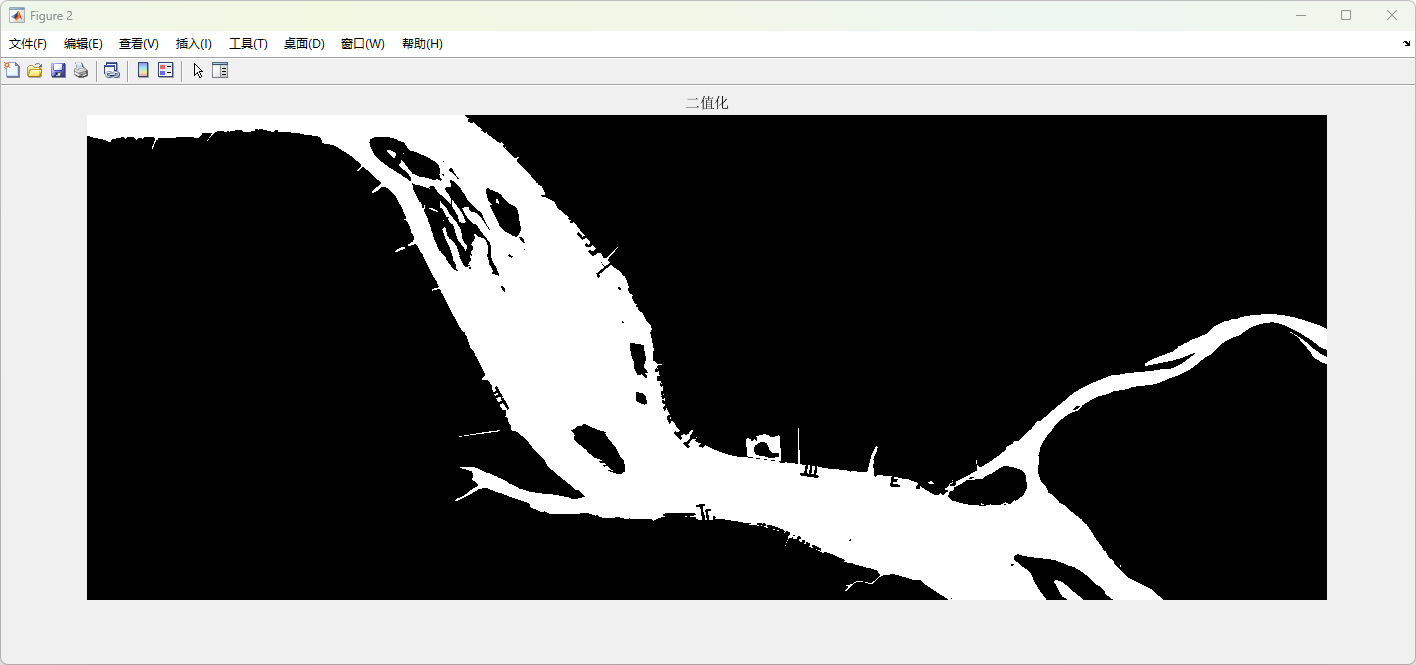
分析:该图是对原图进行二值化处理的结果。二值化的目的是将地图中的水道与非水道区域清晰地区分开来,通常会将水道区域标记为白色,非水道区域标记为黑色。
设置(图3)

这张图展示了在二值化图上进一步处理的结果。可能包括通过手动或自动方式标记和调整白色(通行区域)和黑色(障碍物区域)的边界,以确保路径规划算法能够准确识别可行路径。
路径规划结果(图4)
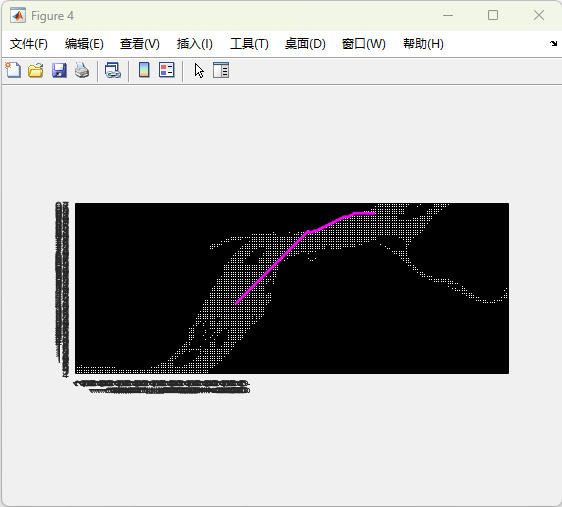
最后一张图展示了路径规划的结果。紫色的线条表示通过路径规划算法(如A*算法)生成的最佳行驶路线。该路线考虑了水道的实际地形和障碍物,以确保行驶的安全性和效率。
这些图像展示了从电子地图的初步处理到最终路径规划结果的全过程。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)