

本研究介绍了一种基于MATLAB平台的扫地机器人路径规划与充电路径优化设计。
项目信息
编号:MOG-37
大小:6M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
项目采用深度优先搜索(DFS)算法对所有节点进行遍历,模拟扫地机器人清扫房间的过程。在清扫任务完成后,使用蚁群算法(ACO)设计出一条回到充电地点的最短路径,模拟机器人工作完成后的自动充电过程。此外,项目对课桌进行了建模,以真实屋子的布局还原了实际清扫环境。仿真结果验证了所设计算法的有效性,为智能扫地机器人提供了可靠的路径规划与回充电路径优化方案。
路径规划或环境建模的图示
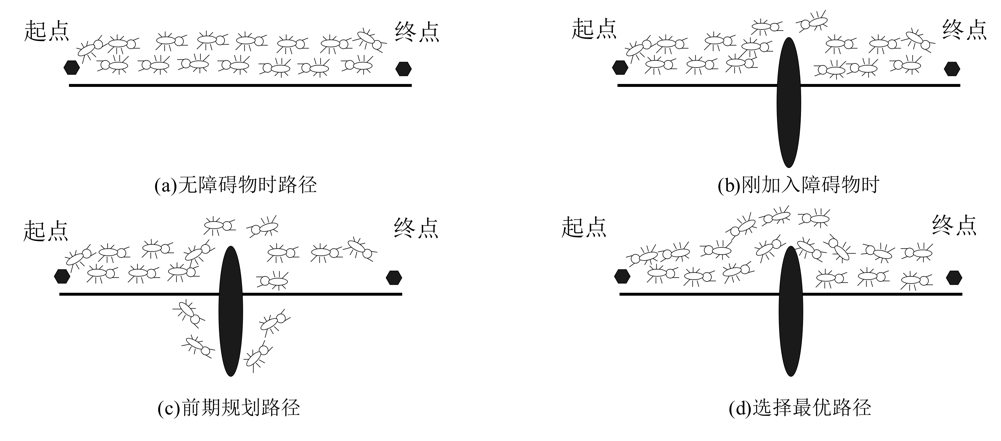
展示了蚁群算法在路径规划中的工作原理,图中分为四个部分,分别描述了不同情况下的蚂蚁寻路过程。以下是每个部分的含义:
(a) 无障碍物时路径:
在起点和终点之间没有障碍物的情况下,蚂蚁随机地从起点出发,最终大部分蚂蚁会找到一条直达终点的路径。这条路径通常是最短路径,因为没有任何障碍物阻挡。
(b) 刚加入障碍物时:
当在起点和终点之间加入一个障碍物后,蚂蚁开始遇到障碍物。此时,蚂蚁会在障碍物周围随机选择路径,有些蚂蚁会绕过障碍物寻找新的路径到达终点。这时路径还没有明显的优化。
(c) 前期规划路径:
在障碍物存在的情况下,经过一段时间后,蚂蚁的行动逐渐集中在能够绕过障碍物的路径上。这时,路径已经开始形成明显的规律,显示出蚂蚁群体对路径的优化过程。
(d) 选择最优路径:
最终,经过多次尝试和信息素的累积,蚂蚁群体找到了一条绕过障碍物的最优路径。这条路径成为了所有蚂蚁的主要通行路线,反映了蚁群算法的全局优化能力。
这幅图通过蚂蚁在不同条件下的路径选择过程,直观地展示了蚁群算法如何从随机探索逐渐收敛到最优路径的过程,体现了算法在路径规划问题中的应用。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
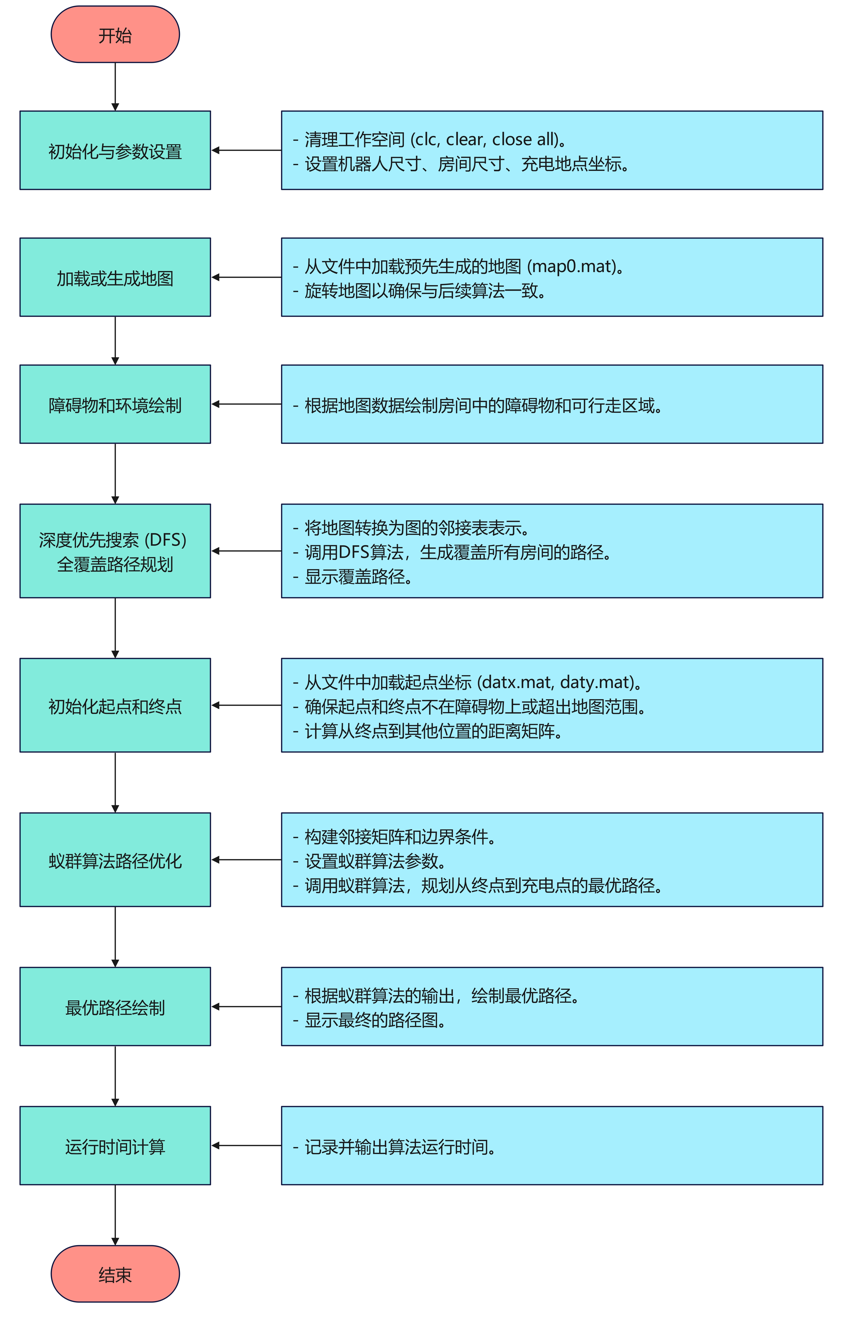
– 项目文档:写作流程
算法流程
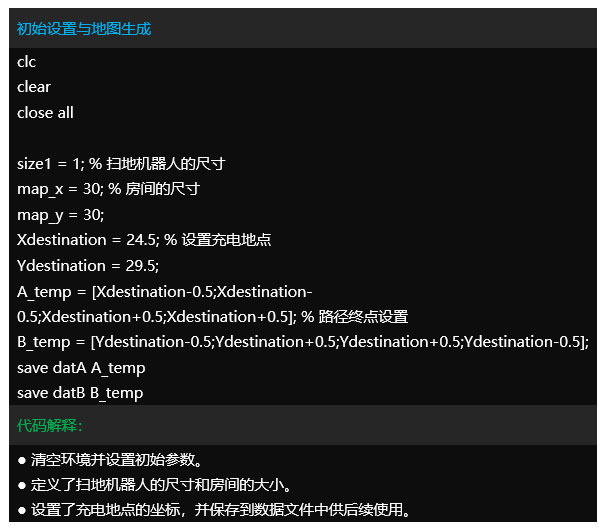
代码讲解
Tipps:仅对main.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 main.m
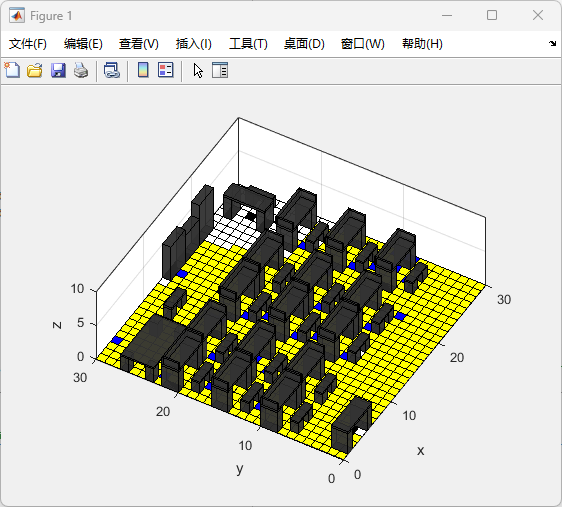
分析:该图展示了扫地机器人在房间内的初始环境设置。图中的三维网格代表房间的平面,黑色块状物体可能表示房间内的障碍物或家具(如桌椅)。黄色的网格区域可能表示机器人可以行走的区域,蓝色的小方块可能表示机器人需要清扫的位置。
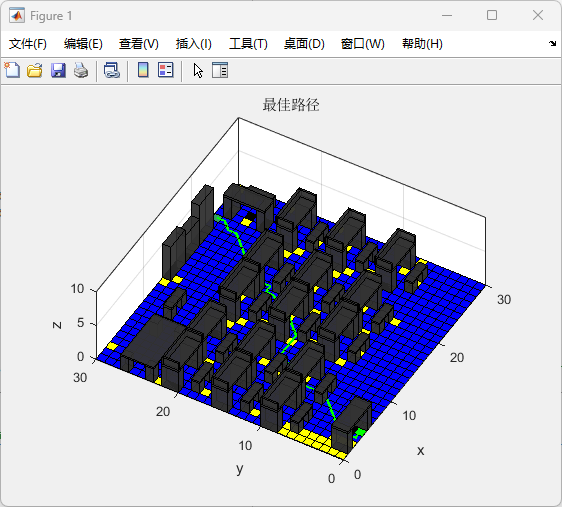
分析:该图展示了扫地机器人规划出的最佳路径。绿色的线条代表机器人在清扫过程中所走的路径。该路径连接了所有需要清扫的位置,同时避开了障碍物,覆盖了整个房间的可清扫区域。图中的蓝色网格可能表示该区域已经被清扫过,标题“最佳路径”说明这条路径是经过算法优化的最佳路径。
![]()
分析:该图显示了“历时 0.931691 秒”,这表示算法计算出最佳路径所花费的时间。这表明算法在不到1秒的时间内计算出了最佳路径,体现了算法的高效性。
这些图表明,机器人成功地执行了路径规划算法,利用深度优先搜索(DFS)算法进行全面的清扫覆盖,并使用蚁群算法设计回到充电地点的最短路径。仿真结果直观展示了机器人在复杂环境下的路径规划和执行过程。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
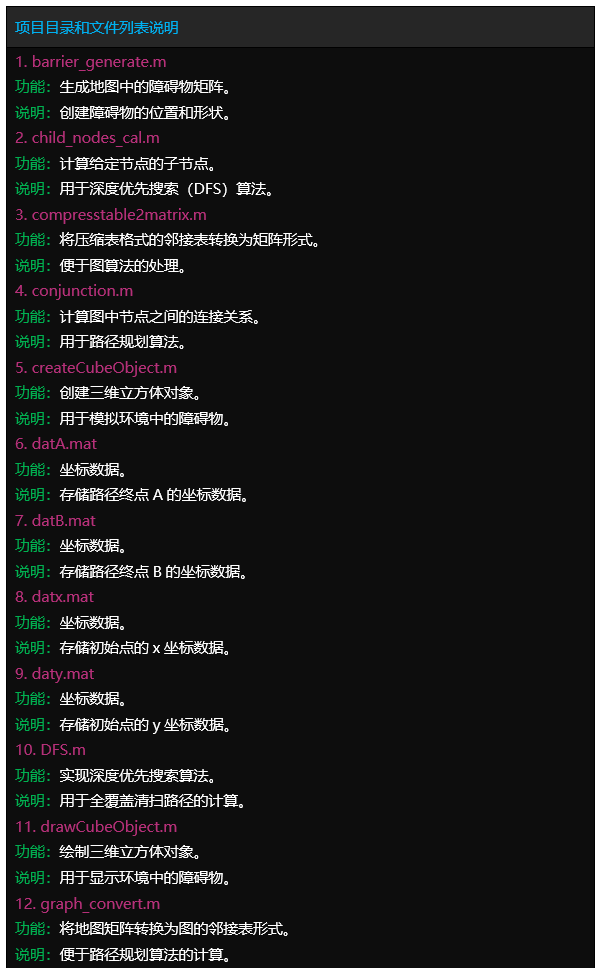
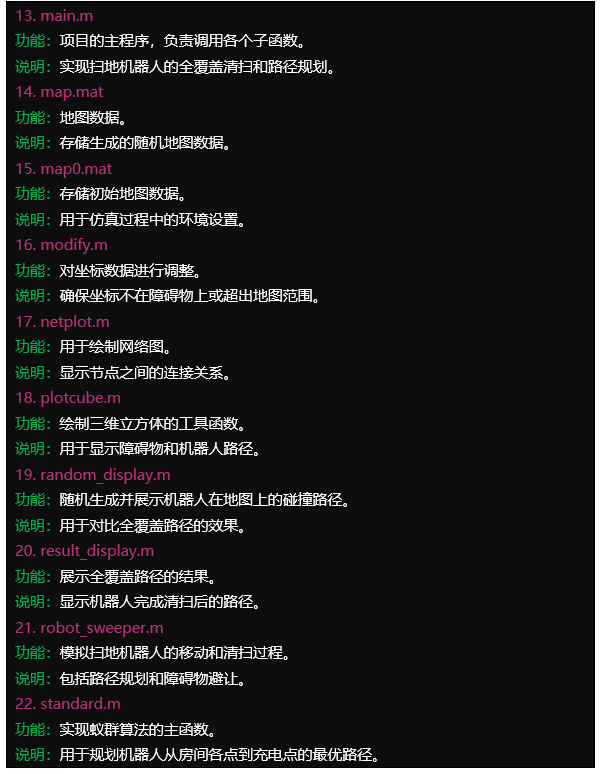
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)