
随着无人机技术的快速发展,其在军事、农业、物流等领域的应用越来越广泛。无人机在执行任务时,如何有效地规划其飞行路径以避免障碍物,成为了研究的热点问题。
项目信息
编号:MOG-12
大小:2.7M
运行条件
Matlab开发环境版本:
– Matlab R2020b
项目介绍
本文提出了一种基于蜻蜓算法的三维航迹规划方法,通过在Matlab环境下实现该算法,实现了对无人机避障路径的优化。

蜻蜓算法模仿了蜻蜓在捕食过程中群体运动的行为,能够在复杂的环境中找到全局最优解。实验结果表明,该方法在路径规划效率和避障性能方面具有显著优势。
项目报告
Tipps:设计报告Word格式,需要另外购买。
– 项目配套文档:设计报告
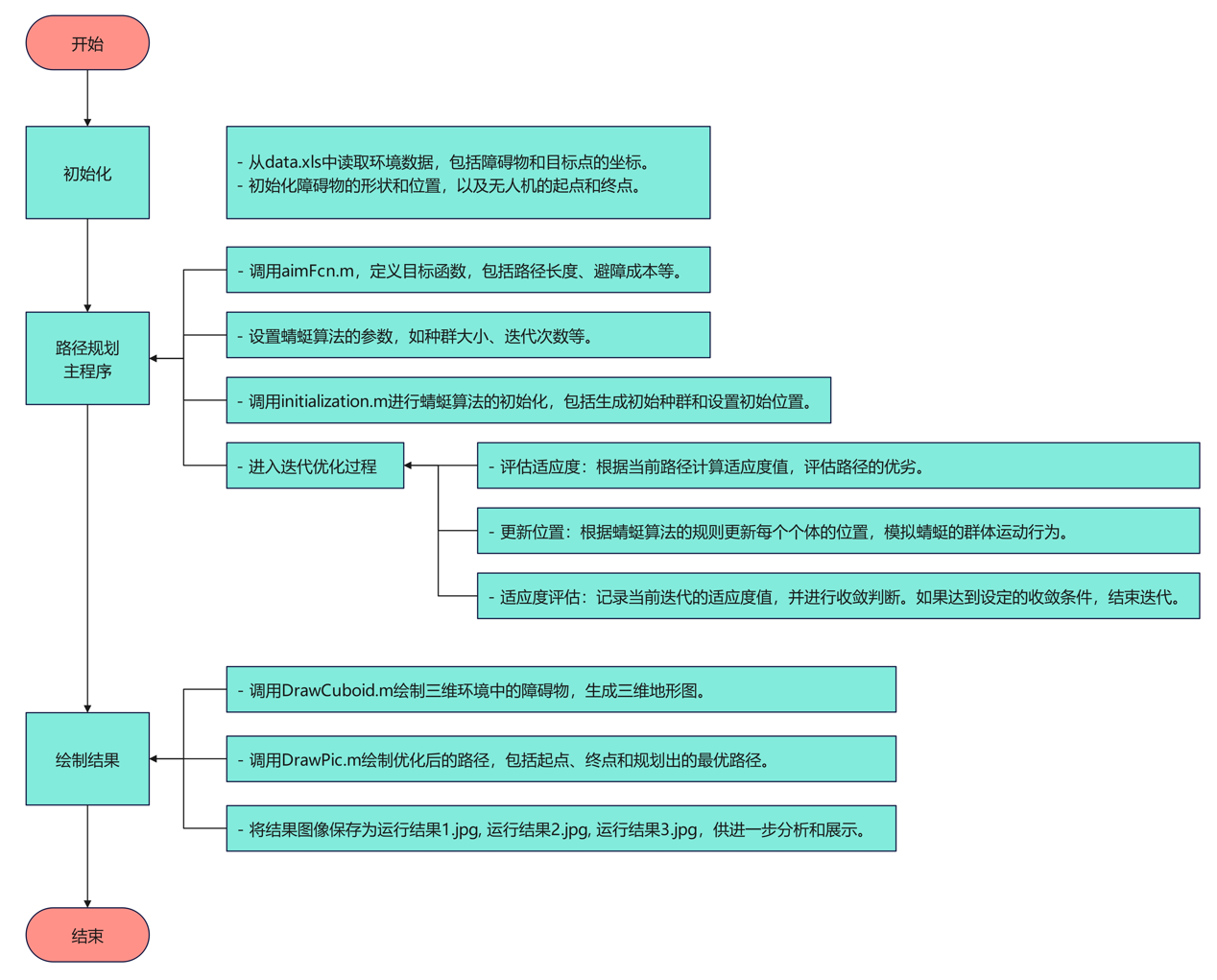
算法流程
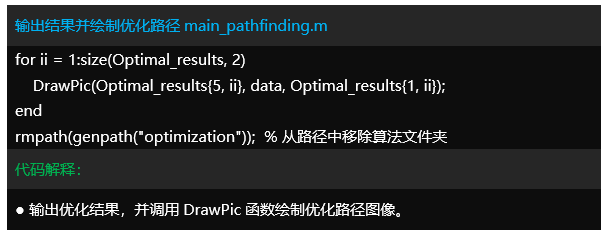
代码讲解
Tipps:仅对main_pathfinding.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
– 运行main_pathfinding.m
图1:三维地形地图
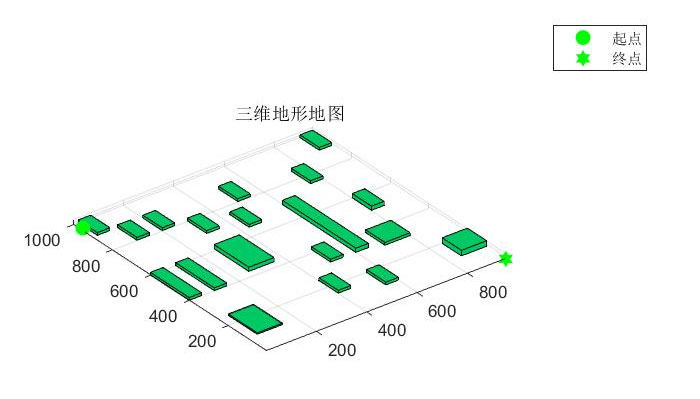
-分析:
(1)内容:图中展示了一片三维地形区域,其中包含多个矩形柱体代表障碍物。地图上标注了起点和终点位置,分别用绿色的五角星和四角星表示。
(2)该图用于展示无人机在三维空间中避障路径规划的问题空间。可以清晰地看到起点、终点以及障碍物的位置分布,为后续的路径规划提供了直观的环境表示。
图2:适应度函数曲线
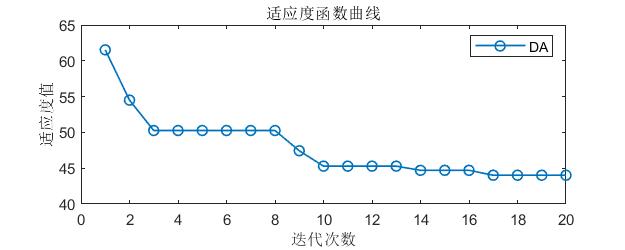
-分析:
(1)内容:该图展示了适应度随迭代次数的变化曲线,其中横坐标为迭代次数,纵坐标为适应度值。曲线标注为“DA”,表示蜻蜓算法的适应度变化。
(2)适应度函数曲线用来评估算法的优化效果。从图中可以看出,随着迭代次数的增加,适应度值逐渐降低并趋于稳定,表明蜻蜓算法在不断优化路径,直到达到收敛状态。
图3:优化结果
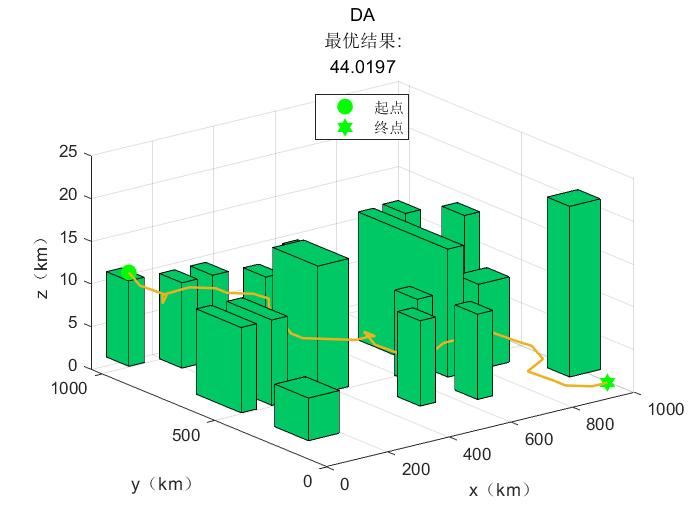
-分析:
(1)内容:该图展示了蜻蜓算法在三维空间中的优化路径。图中包含障碍物、起点、终点和蜻蜓算法规划出的路径。路径从起点出发,绕过多个障碍物,最终到达终点。图中标注了最优结果值为44.0197。
(2)该图用于展示蜻蜓算法在三维避障路径规划中的应用效果。通过图中的路径,可以直观地看到无人机避开障碍物并最终到达目标位置的过程。优化结果值表示路径的长度或成本,反映了算法的优化效果。
以上结果总结:
– 这三个图分别展示了无人机避障三维航迹规划的环境、算法优化过程及其最终结果。
– 通过这些图,可以清晰地理解蜻蜓算法在无人机路径规划中的应用及其效果。
– 图1提供了规划环境的可视化,图2展示了算法优化过程中的性能变化,图3则直观地展示了规划路径的实际效果。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)