
全覆盖路径规划是机器人自主导航领域中的一个重要问题,特别是在清洁机器人和农业自动化等应用中。
项目信息
编号:MOG-11
大小:5.58M
运行条件
Matlab开发环境版本:
– Matlab R2023b
项目介绍
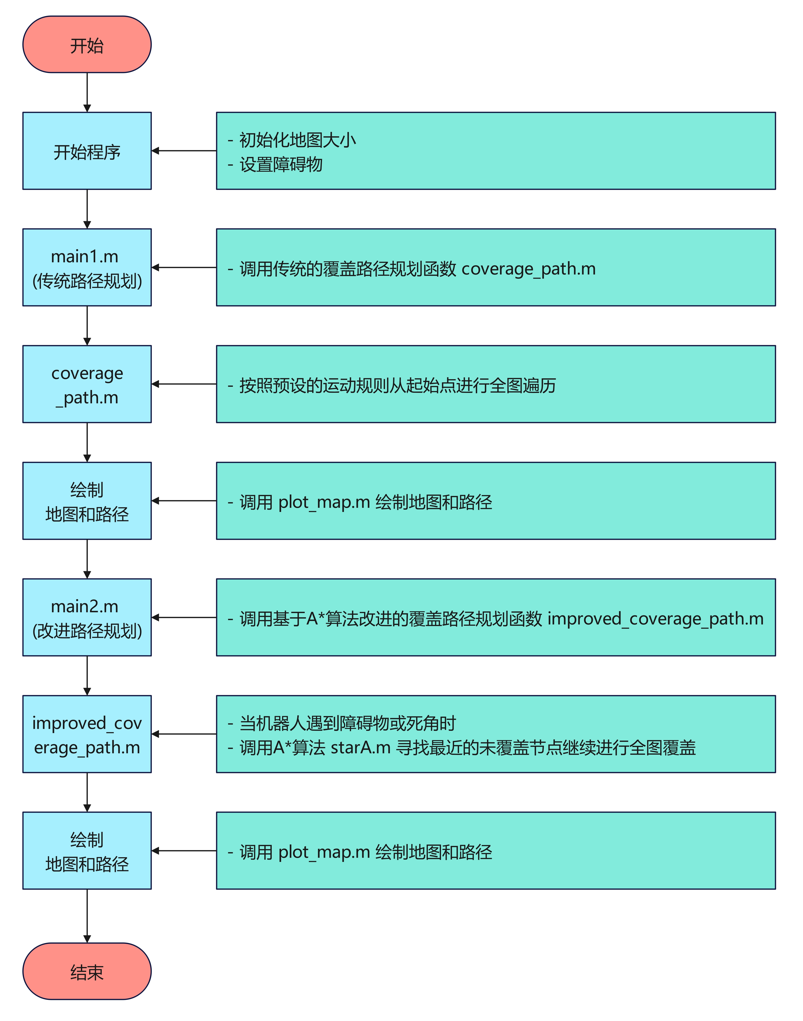
传统的往返式全覆盖路径规划算法在遇到障碍物或进入死角时容易陷入困境,无法实现有效的全图覆盖。为了解决这一问题,本文提出了一种基于A*算法改进的往返式全覆盖路径规划算法。

首先,通过建立二维栅格地图,对环境中的障碍物进行标识,并设置起始点。然后,基于往返式路径规划的定义,利用预设的优先级运动规则从起始点开始进行全图遍历。当机器人遇到障碍物或进入死角位置时,利用A*算法进行路径规划,找到最近的未覆盖节点,并避开障碍物继续进行全图覆盖。最后,通过仿真实验验证了改进算法的有效性和可行性,结果表明改进算法能够在复杂环境中实现高效的全覆盖路径规划。
项目报告
Tipps:设计报告Word格式,需要另外购买。
– 项目配套文档:设计报告
算法流程
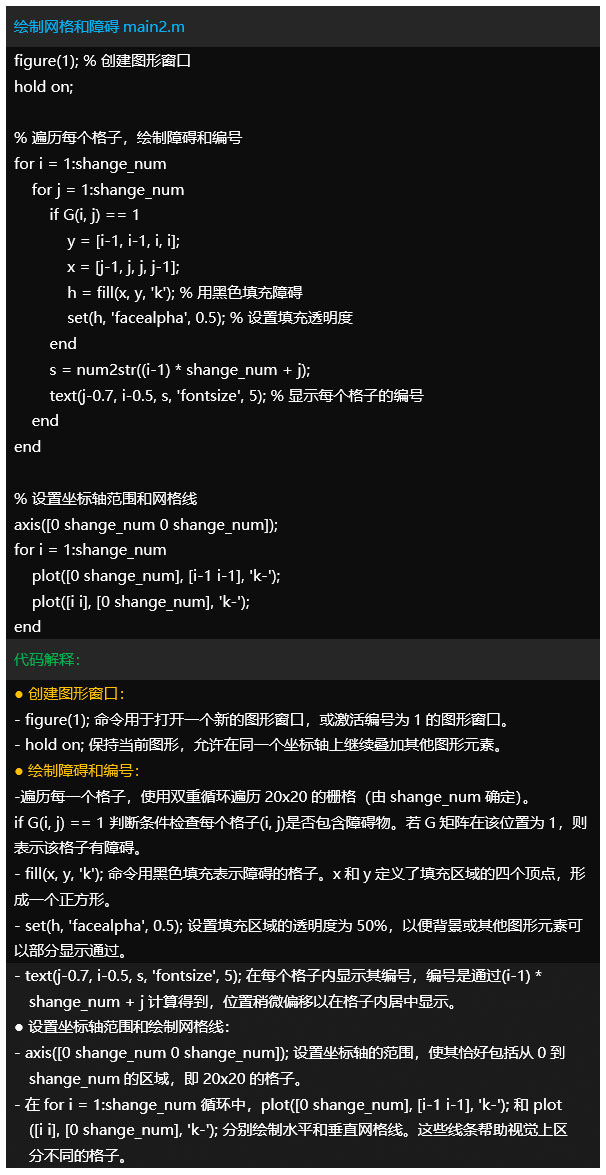
代码讲解
Tipps:仅对main2.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
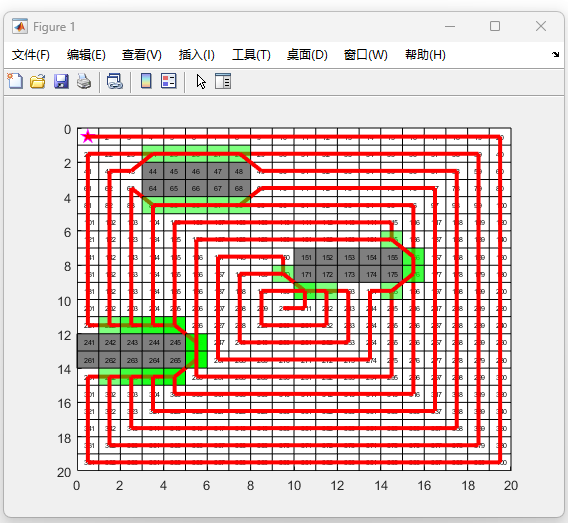
– 运行main1.m
1.往返式全覆盖路径规划
(1)通过建立二维栅格地图,设置障碍物,以及起始点
(2)根据定义往返式路径规划的定义的优先级运动规则从起始点开始进行全图遍历,
(3)利用A星算法逃离死角位置,避开障碍物寻找最近的未覆盖节点,继续进行全图覆盖,最后绘制全覆盖路径
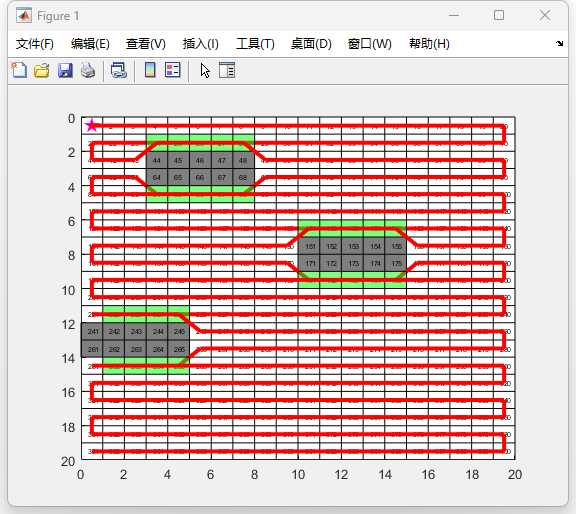

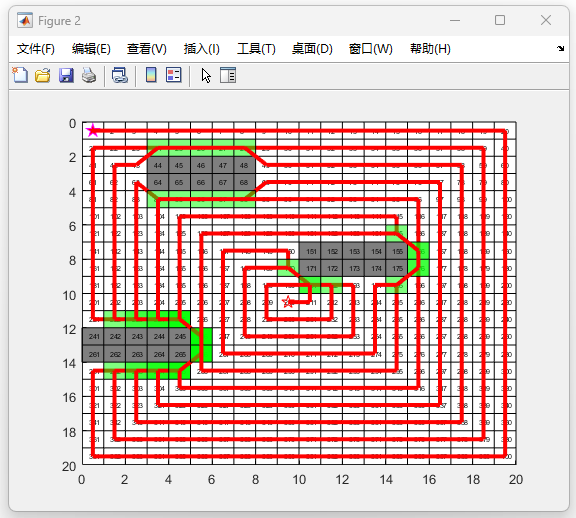
– 运行main2.m
1.Astart逃离死角位置,躲避障碍物
(1)由于传统往返式全覆盖路径规划算法容易与障碍物碰撞或进入死角位置,这里利用A星算法逃离死角位置,保证全图路径规划顺利进行
(2)本算法主要通过MATLAB建立二维栅格地图进行仿真
项目文档
Tipps:可根据您的需要有偿文档撰写及文献翻译。
– 文档格式:WORD、PPT (后续免费修改服务)
– 文献翻译:中译英、英译中 (后续免费修改服务)
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
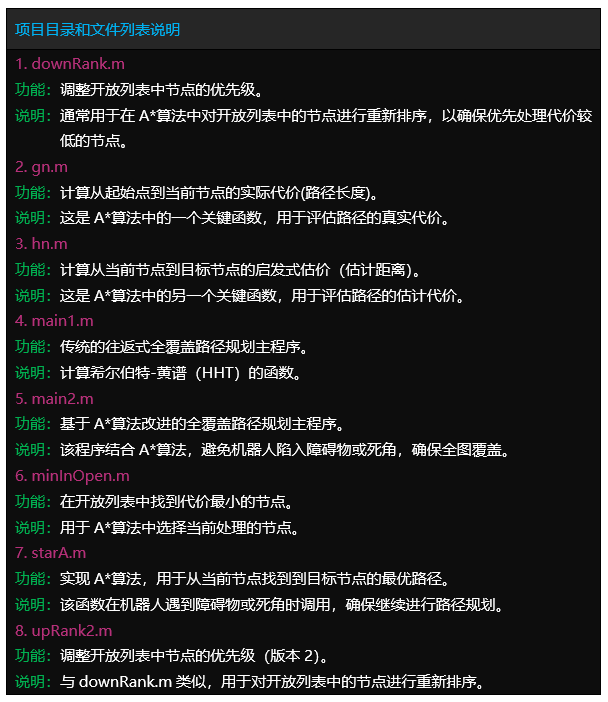
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)