

利用OpenCV实现的车道检测算法。车道检测在自动驾驶和高级驾驶辅助系统(ADAS)中具有重要意义。主要贡献在于开发了一个基于计算机视觉的车道检测系统,并在不同的测试视频中验证了其有效性。
项目信息
编号:PVF-1
大小:54M
运行条件
Python开发环境:
– PyCharm的安装包:Download PyCharm: Python IDE for Professional Developers by JetBrains
– Anaconda的安装包:Anaconda | Start Coding Immediately
– Python开发版本:Python==3.8.5
需要安装依赖包:
– pip install opencv-python==4.6.0.66
项目介绍
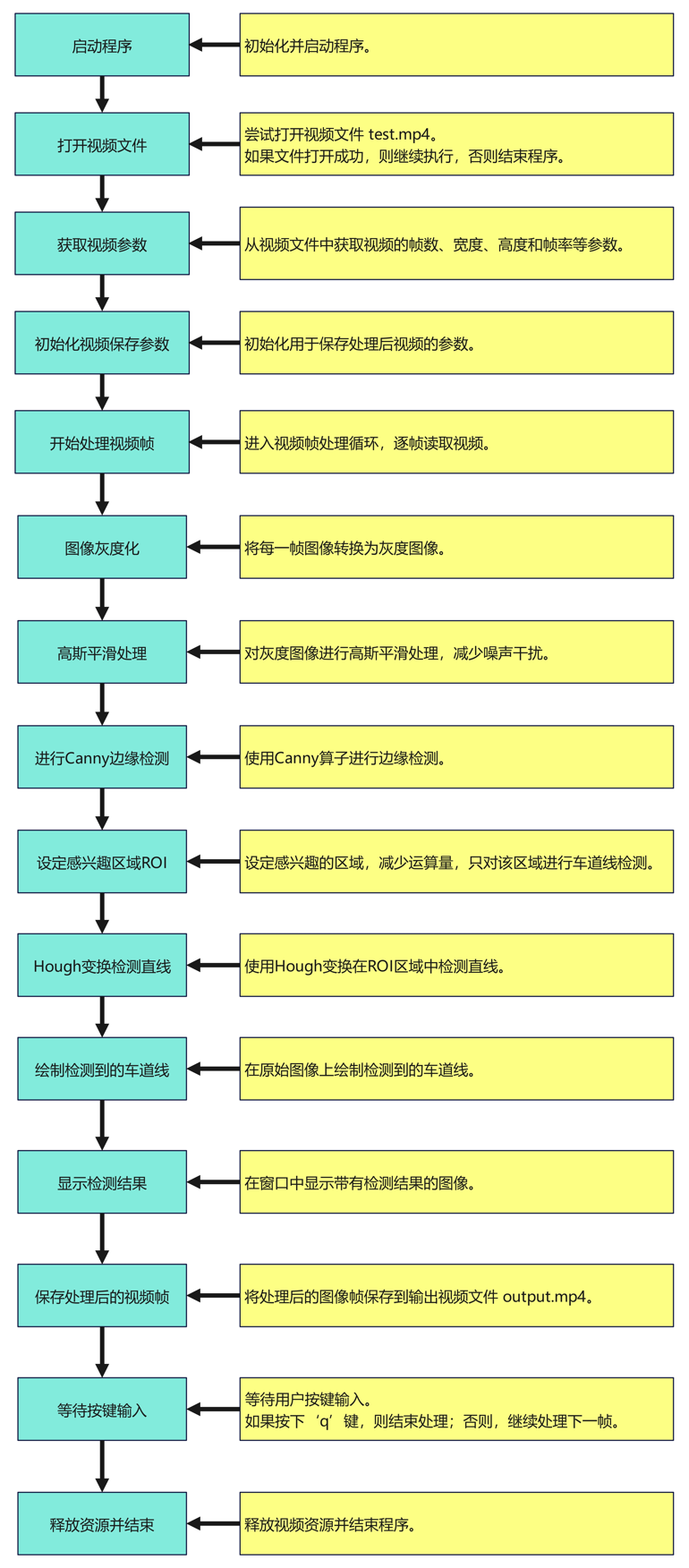
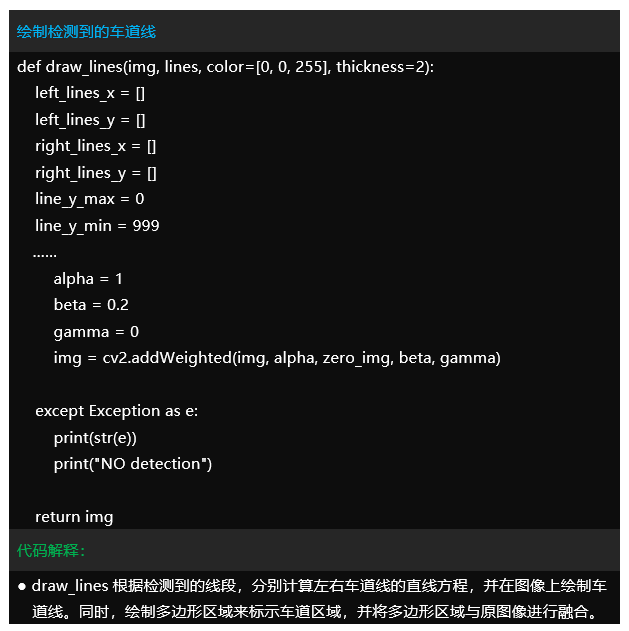
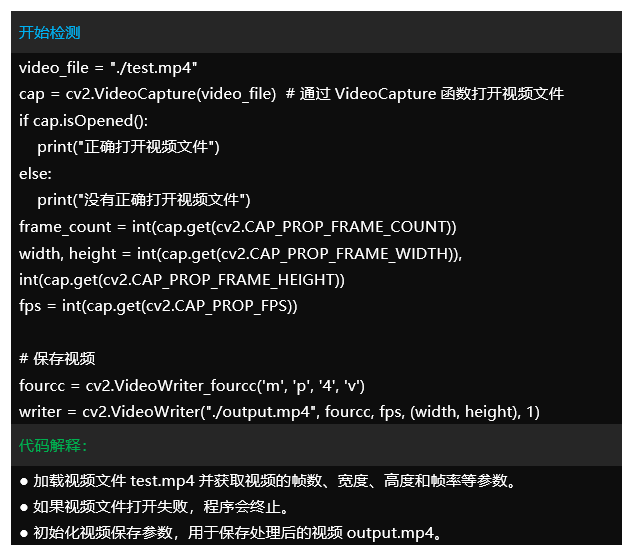
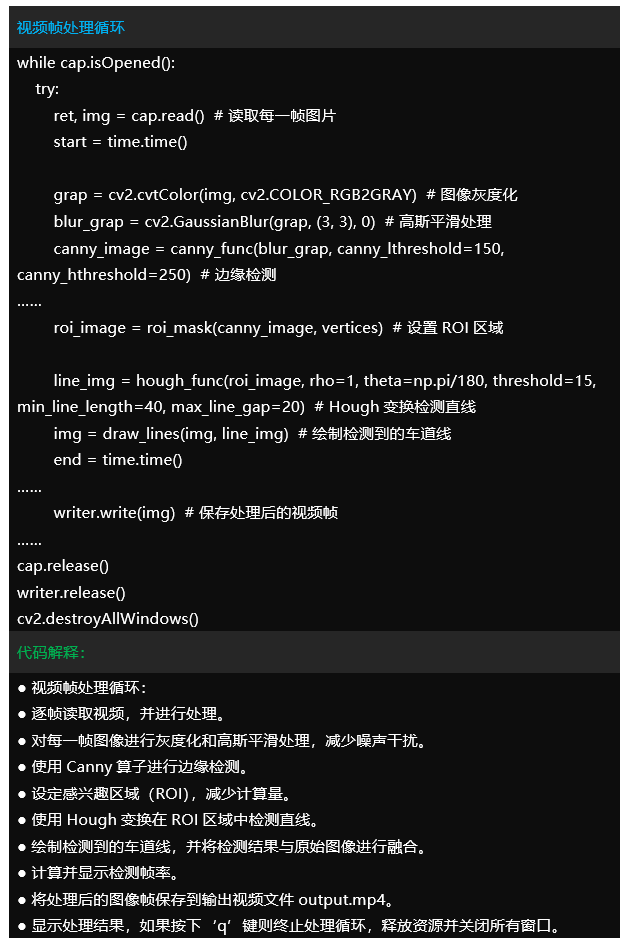
车道检测算法包含以下几个主要步骤:读取输入视频文件,并对每一帧图像进行灰度化和高斯模糊处理,以减少噪声。通过Canny边缘检测算法提取图像中的边缘信息,接着使用霍夫直线变换检测出车道线。为了提高检测的准确性,本文还使用了感兴趣区域(ROI)筛选技术,只保留图像中可能包含车道线的区域。将检测到的车道线绘制在原始图像上,并生成一个包含车道检测结果的视频文件。

实验结果表明,本文提出的车道检测算法在各种道路条件下均能较好地检测出车道线,具有较高的实时性和鲁棒性。该算法的实现和测试代码包含在sample_lane_detection.py脚本中,测试视频和检测结果分别为test.mp4和output.mp4。
算法流程
代码讲解
Tipps:仅对sample_lane_detection.py简单讲解。该项目可以按需有偿讲解,同时提供后续答疑。
运行分析

项目文档
Tipps:可根据您的需要有偿文档撰写及文献翻译。
– 文档格式:WORD、PPT (后续免费修改服务)
– 文献翻译:中译英、英译中 (后续免费修改服务)
远程部署
Tipps:该项目为免费开源,可提供有偿远程协助服务。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)