

基于强化学习算法DQN实现离散3维城市空间环境下的智能航线规划,能根据无人机感知进行避障,并根据风速情况选择能耗较低的路线。
项目信息
编号:PRL-1
大小:4.8M
运行条件
Python开发环境:
– PyCharm的安装包:Download PyCharm: Python IDE for Professional Developers by JetBrains
– Anaconda的安装包:Anaconda | Start Coding Immediately
– Cuda安装包:CUDA Toolkit Archive | NVIDIA Developer
– Cudnn安装包:cuDNN Archive | NVIDIA Developer
需要安装依赖包:
– python==3.8.5
– pip install torch==1.12.0+cu113 torchvision==0.13.0+cu113 torchaudio==0.12.0
– pip install numpy==1.24.4
– pip install pillow==10.3.0
项目介绍
在离散的三维城市空间环境下,基于深度强化学习算法DQN(Deep Q-Network)的智能航线规划问题。为了有效应对复杂城市环境中的路径规划挑战,我们设计了一种基于DQN的智能体,通过学习和交互逐步优化其决策策略。

首先构建了三维城市空间的环境模型,利用离散网格表示城市中的建筑物、道路和空域。然后,设计了智能体的状态表示、动作空间和奖励机制,使其能够在给定的起点和终点之间规划出最优路径。我们在模拟的城市环境中进行了大量的实验,结果表明,基于DQN的智能航线规划算法能够在复杂的三维城市环境中有效地找到最优路径,相较于传统的路径规划算法具有更高的效率和灵活性。本项目的研究为未来无人机、智能交通等领域的路径规划问题提供了新的解决方案和思路。
项目结构
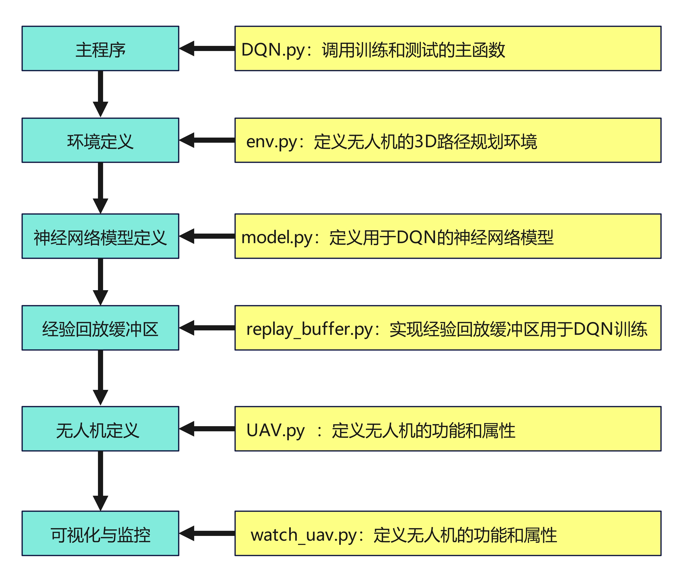
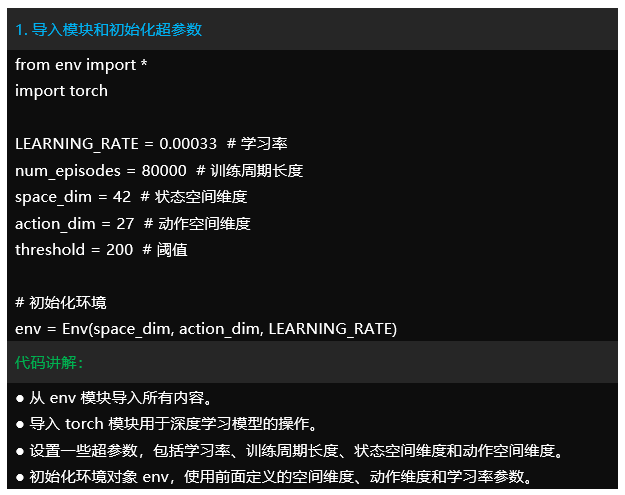
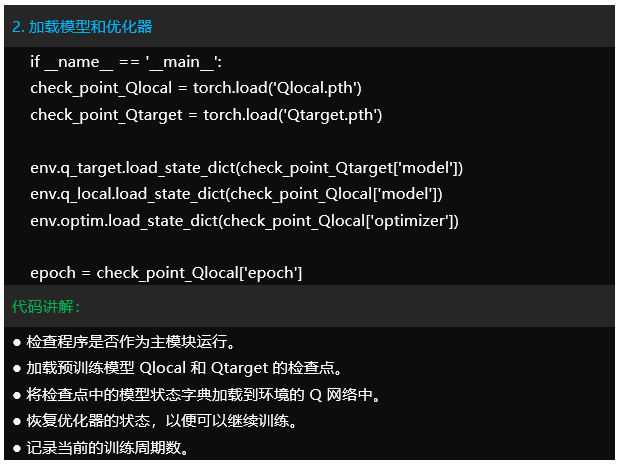
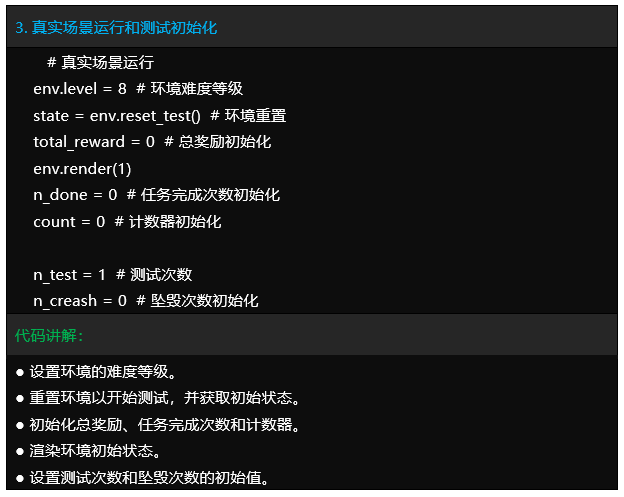
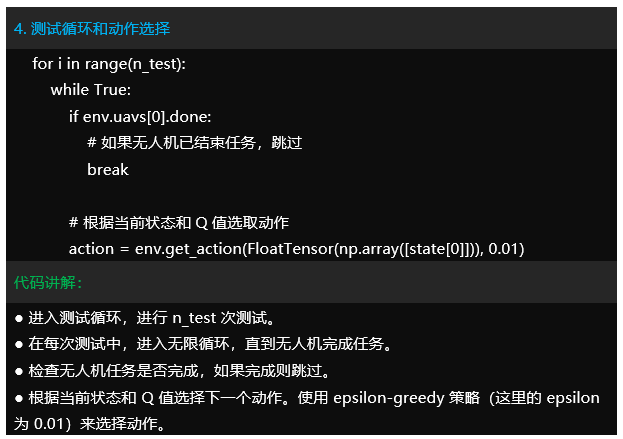
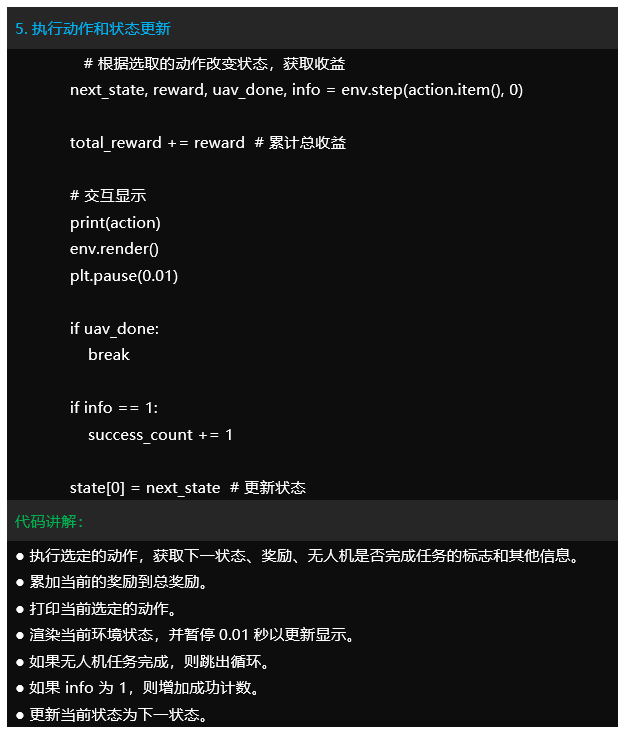
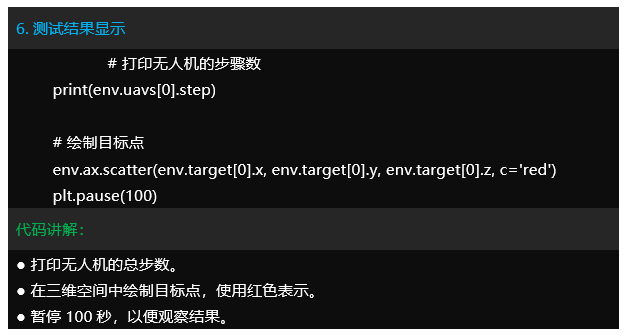
代码讲解
Tipps:仅对watch_uav.py简单讲解。该项目可以按需有偿讲解,同时提供后续答疑。
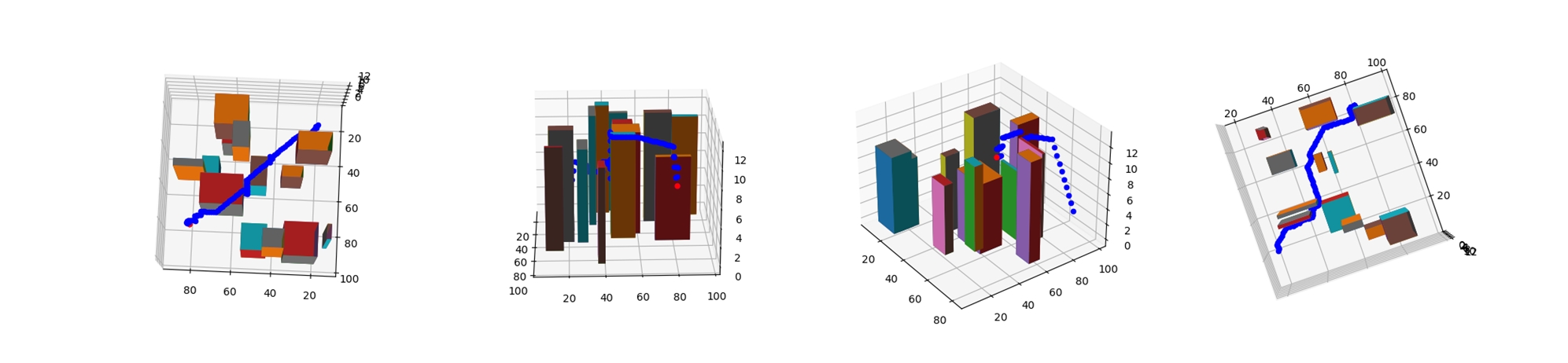
运行效果
Tipps:真实代码运行效果图。
– 动态演示图
– 静态演示图
项目文档
Tipps:可根据您的需要有偿文档撰写及文献翻译。
– 文档格式:WORD、PPT (后续免费修改服务)
– 文献翻译:中译英、英译中 (后续免费修改服务)
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)