

四旋翼无人机在现代航空航天、物流配送、环境监测等领域具有广泛应用,其飞行轨迹的精准跟踪是提高自主导航能力的关键问题。本文基于经典 PID(比例-积分-微分)控制策略,设计了一套完整的四旋翼无人机轨迹跟踪控制系统。首先,建立四旋翼无人机的动力学和运动学模型,并分析其非线性特性。其次,采用 位置-姿态双层PID控制架构,其中外环位置控制器用于生成期望姿态,内环姿态控制器用于调节无人机的姿态响应,从而实现精准的轨迹跟踪。
项目信息
编号:MOG-115
大小:5.5M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024b
项目介绍
四旋翼无人机在现代航空航天、物流配送、环境监测等领域具有广泛应用,其飞行轨迹的精准跟踪是提高自主导航能力的关键问题。本文基于经典 PID(比例-积分-微分)控制策略,设计了一套完整的四旋翼无人机轨迹跟踪控制系统。首先,建立四旋翼无人机的动力学和运动学模型,并分析其非线性特性。其次,采用 位置-姿态双层PID控制架构,其中外环位置控制器用于生成期望姿态,内环姿态控制器用于调节无人机的姿态响应,从而实现精准的轨迹跟踪。
为了验证控制策略的有效性,本文利用 MATLAB/Simulink 进行仿真,并通过 3D 轨迹跟踪、状态响应分析、控制输入变化以及误差分析等多方面进行评估。仿真结果表明,PID 控制器能够有效跟踪设定轨迹,使无人机在 x、y、z 三个方向上的位置误差保持在较小范围内,并快速收敛,同时姿态误差得到有效抑制。该研究为四旋翼无人机的自动控制与工程应用提供了参考,并可进一步扩展到智能控制优化(如自适应PID、LQR、MPC等) 以及 复杂环境中的鲁棒控制 研究。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
1.撰写内容
2.撰写流程
3.撰写优势
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
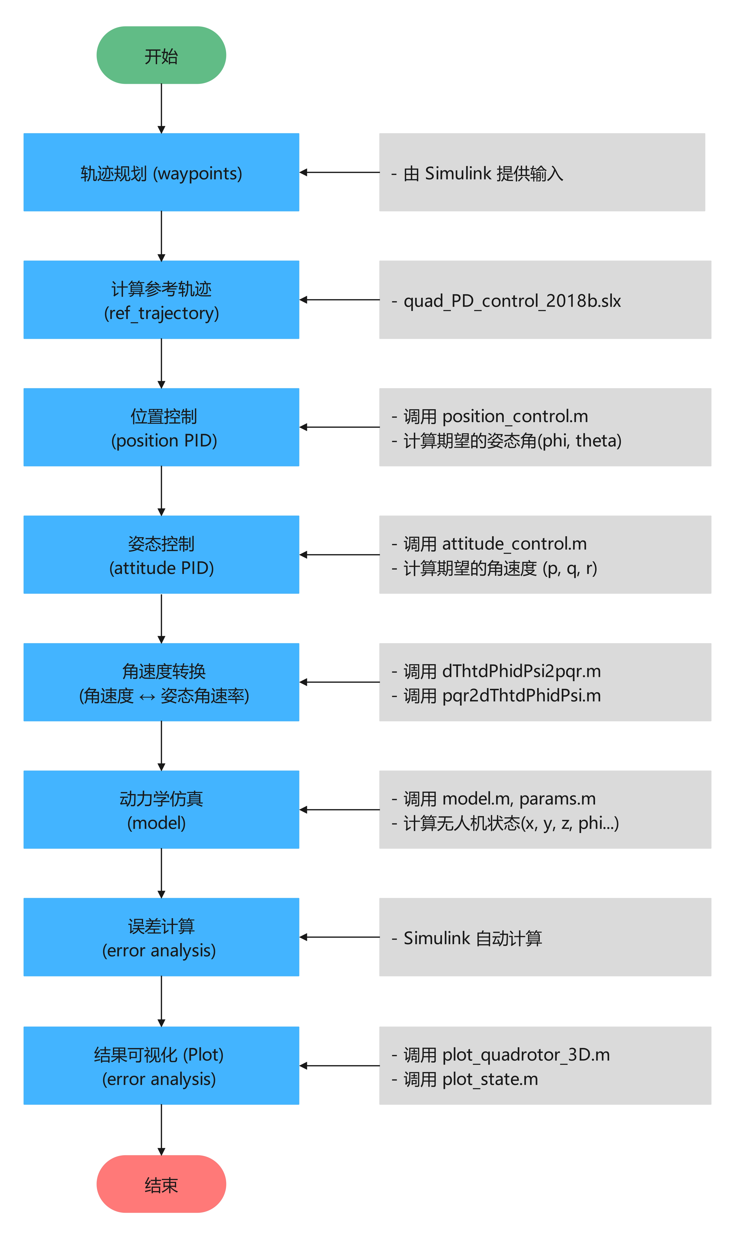
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
1.服务优势
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
运行效果
函数调用关系
quad_PD_control_2018b.slx调用position_control.m 计算无人机位置误差,输出期望姿态
position_control.m调用attitude_control.m 计算无人机姿态误差,输出角速度控制信号
attitude_control.m调用dThtdPhidPsi2pqr.m 将姿态角速率转换为角速度
attitude_control.m调用pqr2dThtdPhidPsi.m 角速度转换回姿态角速率
quad_PD_control_2018b.slx调用model.m 计算无人机动力学响应
model.m params.m调用读取无人机参数(质量、惯性矩等)
quad_PD_control_2018b.slx调用plot_quadrotor_3D.m 绘制 3D 轨迹
quad_PD_control_2018b.slx调用plot_state.m 绘制状态变量随时间变化曲线
运行 quad_PD_control_2018b.slx
1. Simulink 模型
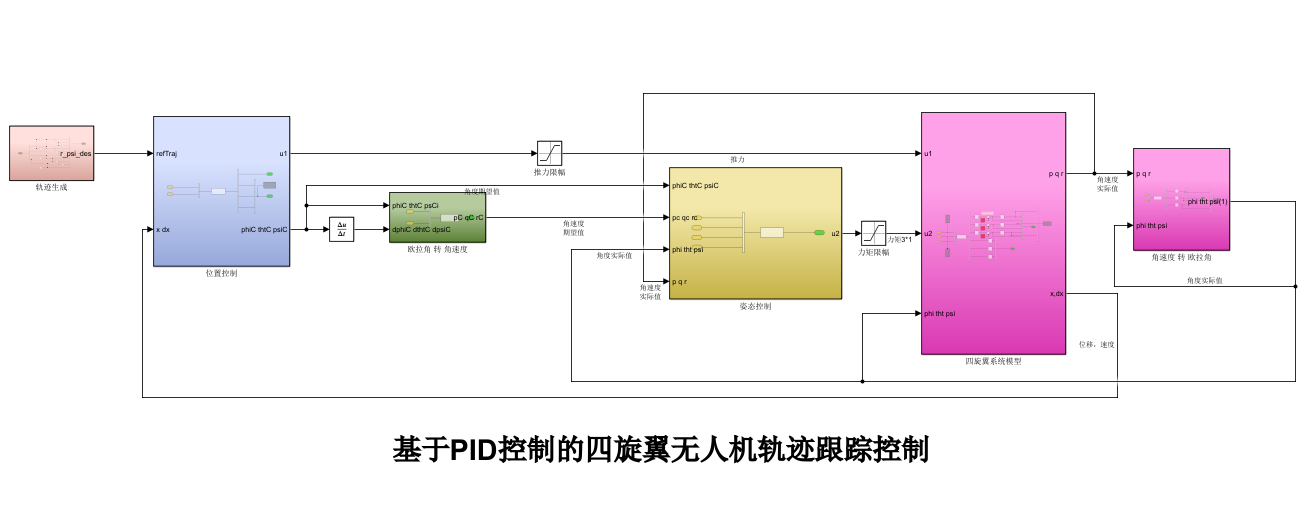
第一张图显示的是四旋翼无人机的 PID 控制框架,包含 轨迹规划、位置控制、姿态控制 和 动力学模型 等模块。
其中,位置控制器 和 姿态控制器 采用了 PID(或其变体,如 PD 控制)。
反馈回路清晰,包含 误差计算、控制信号计算、执行器动态响应,符合典型的四旋翼控制架构。
2. 3D 轨迹跟踪
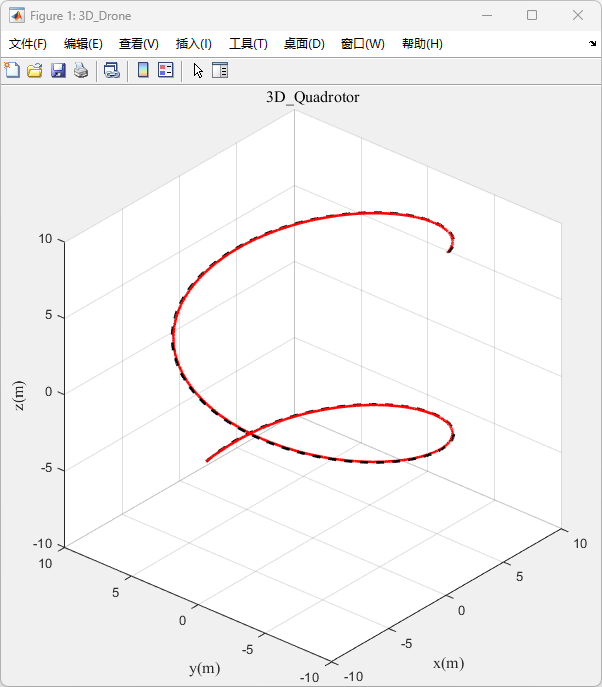
第二张图展示了 MATLAB 3D 轨迹跟踪结果,红色轨迹是期望轨迹,黑色轨迹是实际无人机运动轨迹。
轨迹误差较小,说明 PID 控制效果较好。
3. 状态跟踪分析
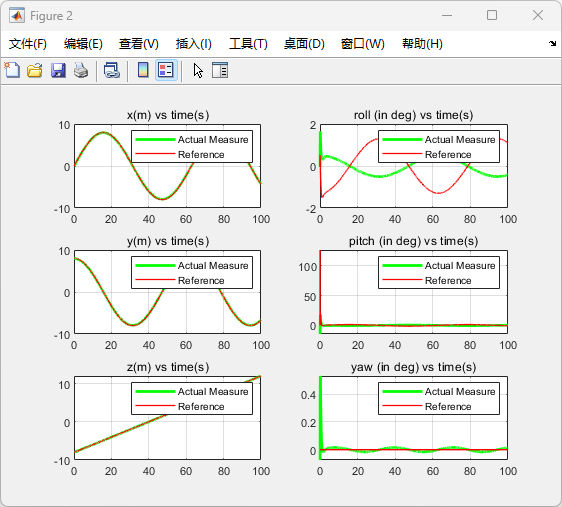
第三张图展示了各个状态(位置、角度)随时间的变化情况,参考轨迹(红色)与实际测量值(绿色)基本一致,误差较小。
4. 控制输入
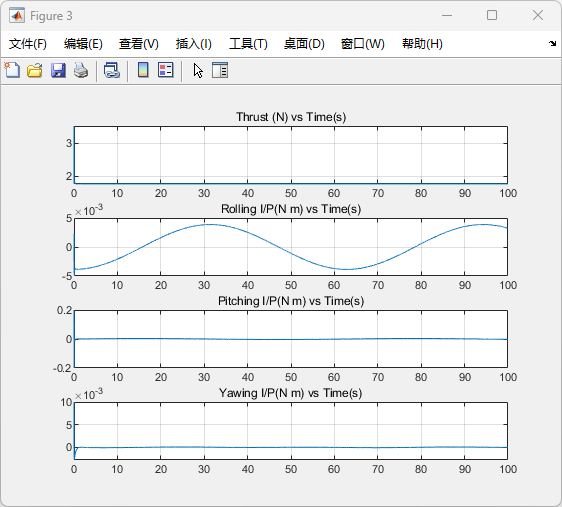
第四张图展示了推力(Thrust)、滚动力矩、俯仰力矩和偏航力矩的变化趋势,反映了 PID 控制对无人机的操纵作用。
5. 误差分析
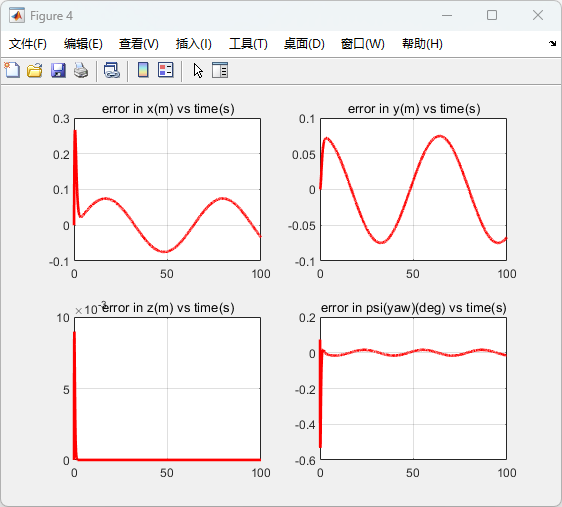
第五张图给出了误差信号(位置和偏航角)的随时间变化情况。误差总体较小且收敛,说明 PID 控制器的调节是有效的。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件

文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)