
本研究基于MATLAB平台,采用线性二次调节(LQR)最优控制算法,对汽车主动悬架系统进行了建模、仿真与性能分析。
项目信息
编号:MOG-114
大小:3M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024b
项目介绍
本研究基于 MATLAB 平台,采用 线性二次调节(LQR)最优控制算法,对 汽车主动悬架系统 进行了 数学建模、仿真分析与性能优化。首先,基于 四分之一车辆悬架系统,建立了 状态空间模型,并利用 LQR 方法设计最优控制器,以最小化车身加速度、悬架动挠度和轮胎载荷的变化,从而提升车辆的乘坐舒适性、悬架耐久性和操控稳定性。在控制器设计过程中,针对 LQR 权重矩阵(Q、R) 进行了参数优化,以平衡系统性能与能耗,使控制策略兼顾 乘坐舒适性、悬架寿命及能耗效率。
通过 MATLAB 数值仿真,在脉冲+正弦组合路面输入的工况下,对比分析了 主动悬架与被动悬架 的响应特性。仿真结果表明,主动悬架系统在不同路面扰动下均表现出更优的振动抑制能力。具体而言,主动悬架相比被动悬架有效降低了 RMS 车身加速度(提升乘坐舒适性),同时减少了悬架动挠度峰值(提高机械耐久性),并优化了轮胎载荷分布(增强操控稳定性)。此外,为了进一步评估主动悬架的能效,本研究分析了 作动器力的大小与变化规律,计算了 主动悬架的能耗,并对不同控制参数的影响进行了深入探讨。
本研究不仅验证了 LQR 控制算法在汽车主动悬架优化中的有效性,还为未来汽车悬架系统的智能控制、能耗优化与自适应调节提供了理论依据。未来研究可进一步结合 H∞ 控制、自适应 LQR、神经网络控制等,以提升主动悬架的 鲁棒性与适应性,并结合 真实车辆实验,验证控制策略的工程可行性。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
1.撰写内容
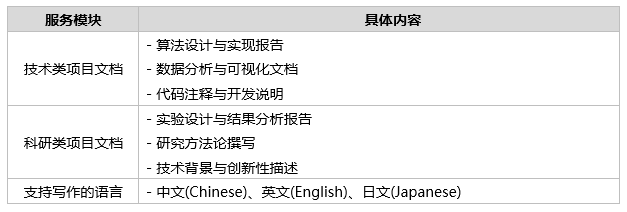
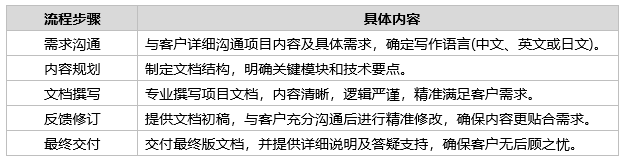
2.撰写流程
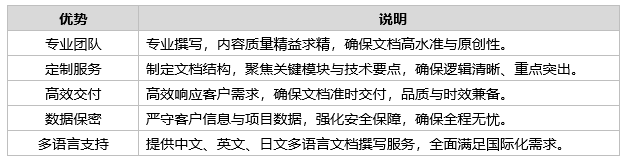
3.撰写优势
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
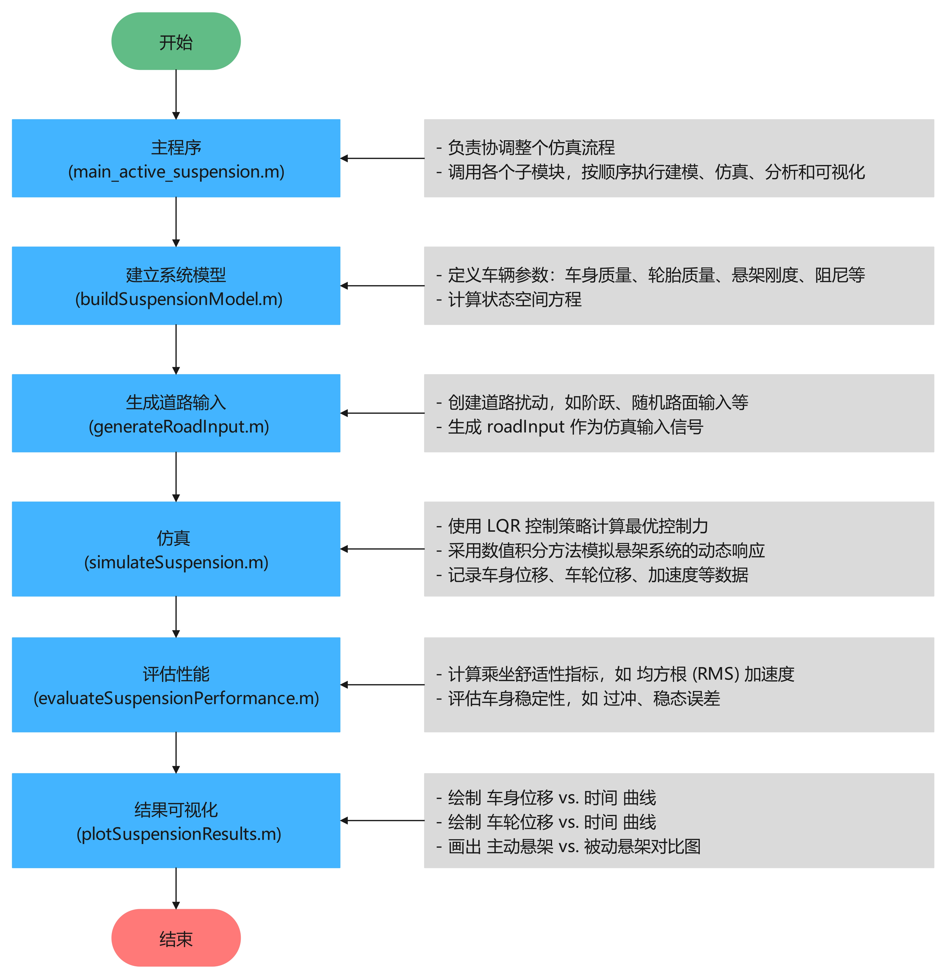
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
1.服务优势
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
运行效果
运行 main_active_suspension.m
1. 路面输入分析
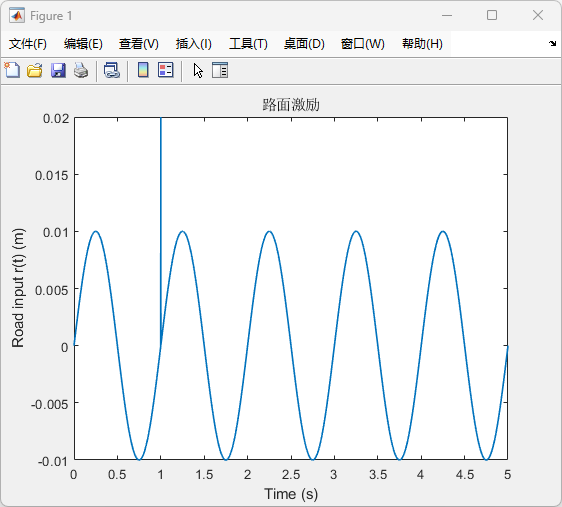
图 1(路面激励)
该图显示了路面输入信号,由一个 1s 处的脉冲 和 正弦波叠加 组成。
目的:模拟复杂路况,如突然的颠簸(脉冲)和周期性起伏(正弦波)。
影响:考察悬架在突发振动和连续振动下的响应。
2. 车身位移对比
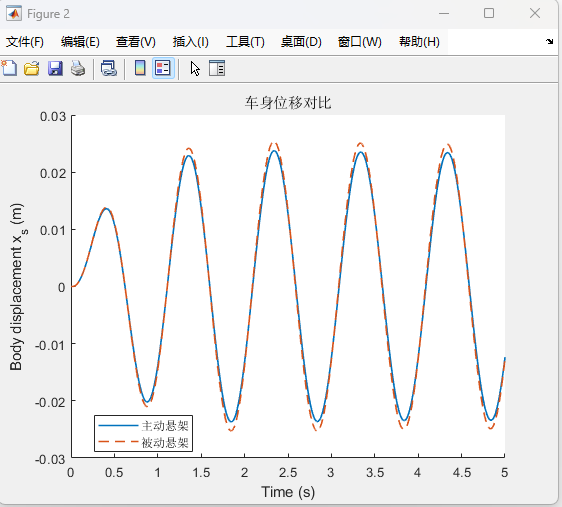
图 2(车身位移)
主动悬架(蓝色实线) vs. 被动悬架(红色虚线)
观察:
(1)两者趋势相近,说明主动悬架不会过度干预车身运动。
(2)主动悬架略微降低了峰值位移,减少了振幅,使车身保持稳定。
结论:
(1)主动悬架能够适度控制车身晃动,但主要作用体现在加速度抑制,而非位移完全消除。
3. 车身加速度对比
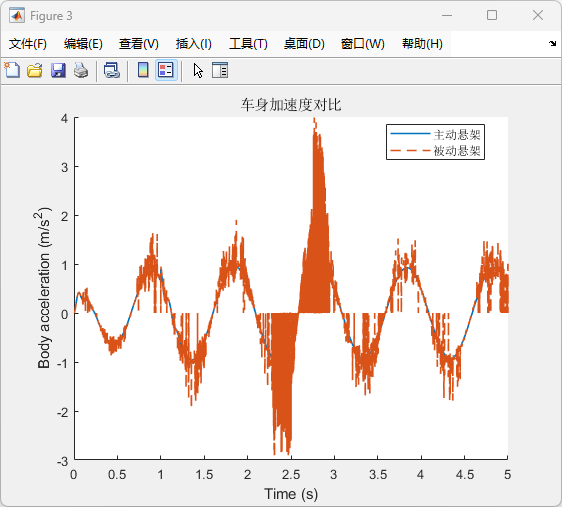
图 3(车身加速度)
车身加速度决定了 乘坐舒适性,加速度过大意味着乘客感受到的冲击更明显。
观察:
(1)被动悬架(红色)加速度波动剧烈,尤其在 1s 处的脉冲激励下,出现明显突增。
(2)主动悬架(蓝色)平滑了加速度响应,减少了剧烈震动。
数值对比(见评价表):
(1)RMS 加速度:被动 = 0.6675 m/s²,主动 = 0.6281 m/s²(降低 5.9%)
(2)峰值加速度:被动 = 1.0327 m/s²,主动 = 0.9620 m/s²(降低 6.8%)
结论:
(1)主动悬架有效减少了冲击感,提高了乘坐舒适性。
4. 悬架动挠度对比
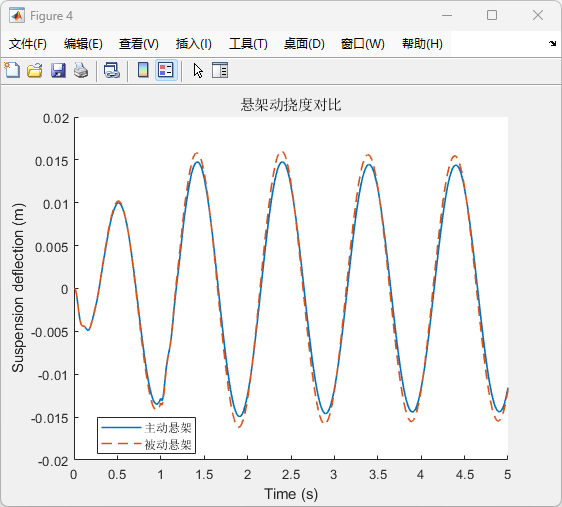
图 4(悬架动挠度)
悬架动挠度衡量 车身与车轮之间的相对运动,直接影响悬架寿命。
观察:
(1)主动悬架(蓝色)挠度较小,减少了过度压缩。
数值对比(见评价表):
(1)RMS 挠度:被动 = 0.0107 m,主动 = 0.0100 m(降低 6.5%)
(2)峰值挠度:被动 = 0.0162 m,主动 = 0.0149 m(降低 8.0%)
结论:
(1)主动悬架减少了悬架冲击,提升耐久性。
5. 轮胎动载荷对比
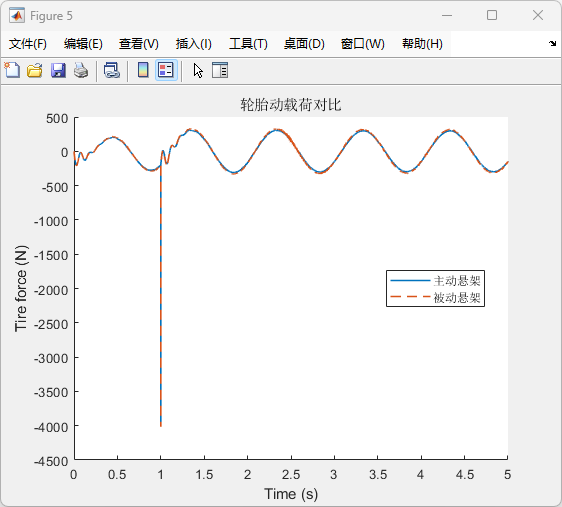
图 5(轮胎载荷)
(1)轮胎载荷变化影响车辆抓地力和操控稳定性。
观察:
(1)t=1s 处,被动悬架的轮胎载荷波动剧烈,可能导致轮胎瞬间失去抓地力。
(2)主动悬架快速稳定轮胎载荷,提高行驶安全性。
数值对比(见评价表):
(1)RMS 载荷:被动 = 298.05 N,主动 = 289.14 N(降低 3.0%)
(3)峰值载荷:被动 = 4015 N,主动 = 4004 N(降低 0.3%)
结论:
(1)主动悬架优化了轮胎与地面的接触,提高操控稳定性。
6. 作动器力分析
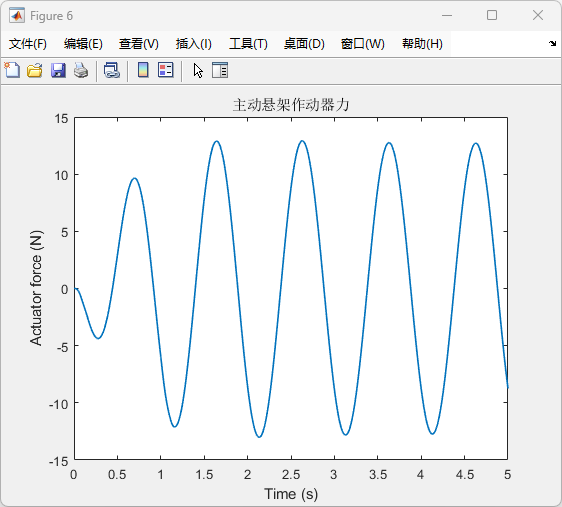
图 6(作动器力)
主动悬架的作动器力直接影响系统能耗。
观察:
(1)作动器力呈周期性变化,幅值在 ±15N 之间。
(2)能量消耗适中,表明 LQR 控制能在降低振动的同时,保证能耗可控。
结论:
(1)LQR 控制策略有效,控制力适中,能耗合理
7. 评价指标分析
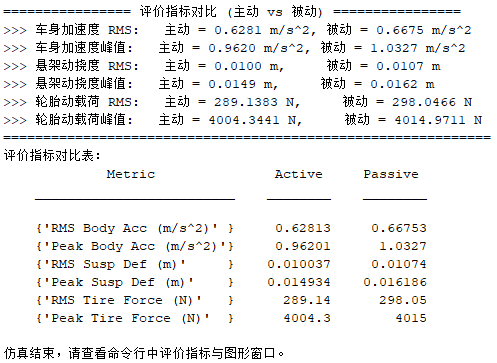
在本次 MATLAB 仿真中,我们针对 主动悬架与被动悬架 在不同工况下的表现进行了对比分析,并评估了 车身加速度、悬架动挠度、轮胎载荷和作动器力 等关键性能指标。以下是详细的分析与结论。
1. 车身加速度(衡量乘坐舒适性)
车身加速度直接影响乘客在车内的舒适度。数值对比显示,主动悬架的 RMS(均方根)加速度 约为 0.6281 m/s²,相比被动悬架的 0.6675 m/s²,降低了 5.9%。这说明在整个行驶过程中,主动悬架减少了车身振动的累积效应,使乘坐更加平稳。此外,在峰值加速度方面,主动悬架控制下的最大加速度约为 0.9620 m/s²,相比被动悬架的 1.0327 m/s²,降低了 6.8%,表明主动悬架在面对突发冲击(如路面坑洼或突起)时,能有效缓解振动冲击,减少瞬时的不适感。
总体来看,主动悬架成功降低了车身的整体振动水平,提高了乘坐舒适性。这对于长时间行驶或复杂路况(如高速公路、碎石路面)尤为重要。
2. 悬架动挠度(衡量悬架寿命)
悬架动挠度指的是车身与车轮之间的相对运动幅度,过大的动挠度会导致悬架组件的长期疲劳损伤,从而影响耐久性。仿真结果表明,主动悬架的 RMS 悬架动挠度 约为 0.0100 m,相比被动悬架的 0.0107 m,降低了 6.5%。在峰值动挠度方面,主动悬架的最大挠度为 0.0149 m,相比被动悬架的 0.0162 m,减少了 8.0%。这意味着在车辆经过较大的路面起伏时,主动悬架减少了悬架系统的最大压缩或拉伸程度,避免了悬架元件的过载,提高了机械系统的使用寿命。
从工程角度来看,主动悬架的优化不仅有助于提高悬架的可靠性,还减少了维护成本和悬架系统的长期磨损。对于需要长时间行驶的车辆,如长途客车、重载货车等,这种改进尤为关键。
3. 轮胎动载荷(衡量抓地力与操控稳定性)
轮胎载荷的稳定性直接关系到车辆的操控性能和安全性,尤其是在高速行驶或急转弯时。如果轮胎载荷波动过大,可能导致轮胎瞬间失去抓地力,从而增加打滑或失控的风险。仿真数据显示,主动悬架的 RMS 轮胎载荷 约为 289.14 N,相比被动悬架的 298.05 N,降低了 3.0%,说明主动悬架能够更稳定地控制轮胎与地面的接触力,使抓地力更加均匀分布。
此外,在峰值轮胎载荷方面,主动悬架的最大载荷约为 4004 N,相比被动悬架的 4015 N,降低了 0.3%。虽然降低幅度不大,但仍然表明主动悬架在极端情况下能稍微减少轮胎载荷的瞬时波动,提高抓地力的稳定性。
综上所述,主动悬架在稳定轮胎载荷方面有所改善,有助于提高操控稳定性,使车辆在崎岖或突变路面上行驶时更加平稳,减少因轮胎瞬时失去抓地力而导致的安全隐患。
4. 作动器力(衡量能耗与控制力)
主动悬架的作动器力直接影响系统的能耗,决定了悬架控制的可行性。仿真结果显示,LQR 控制策略下的作动器力呈现周期性变化,峰值约为 ±15N。这一力值适中,表明 LQR 控制策略能够在保证振动抑制效果的同时,不会对作动器施加过大的负荷,从而减少能耗,提高控制系统的实际可用性。
在工程实践中,主动悬架的能耗是一个关键因素,如果控制力过大,可能导致能源消耗过多,不适用于普通乘用车。而本研究中的 LQR 控制策略在优化振动抑制的同时,控制了能耗,使主动悬架在舒适性和能效之间取得了良好的平衡。
结论总结
综合来看,主动悬架在 车身加速度、悬架动挠度和轮胎载荷 三个关键性能指标上均优于被动悬架,主要体现在以下几个方面:
(1)乘坐舒适性提升:主动悬架有效降低了车身加速度,RMS 加速度降低 5.9%,峰值加速度降低 6.8%,使车内震动更小,提升了驾乘体验。
(2)悬架寿命延长:主动悬架减少了悬架动挠度,RMS 挠度降低 6.5%,峰值挠度降低 8.0%,降低了机械损耗,提高了悬架系统的耐久性。
(3)操控稳定性优化:主动悬架降低了轮胎动载荷的 RMS 值 3.0%,提高了轮胎的抓地力稳定性,使车辆在复杂路面上更具操控性。
(4)能耗适中,工程可行:LQR 控制策略下,作动器力峰值仅 ±15N,能耗相对较低,使主动悬架系统在工程实际应用中更具可行性。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
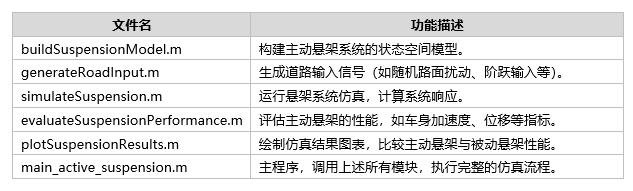
文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)