

随着交通管理和智能化技术的不断发展,传统的交通控制方式面临着日益增加的挑战。交警手势作为一种重要的交通指挥方式,在繁忙的路段和复杂的交通环境中起到了至关重要的作用。然而,由于手势信号的多样性和环境的复杂性,人工解读手势信号的效率和准确性存在一定局限。为了解决这一问题,本研究提出了一种基于深度学习的卷积神经网络(CNN)的交警手势识别系统,旨在实现对交警手势信号的自动识别与解释,从而提高交通管理的效率和准确性,提升道路安全性。
项目信息
编号:PDV-148
大小:2.98G
运行条件
Python开发环境:
– PyCharm的安装包:PyCharm: Python IDE for Professional Developers
– PyCharm的历史安装包:PyCharm: Python IDE for Professional Developers
– Anaconda的安装包:Anaconda | Start Coding Immediately
– Python开发版本:Python==3.9
需要安装依赖包:
– pip install PyQt5== 5.15.11
– pip install Pillow==9.5.0
– pip install opencv-python==4.10.0.84
– pip install torch==2.4.0
– pip install torchvision==0.19.0
– pip install numpy== 1.26.4
– pip install matplotlib==3.9.2
项目介绍
随着交通管理和智能化技术的不断发展,传统的交通控制方式面临着日益增加的挑战。交警手势作为一种重要的交通指挥方式,在繁忙的路段和复杂的交通环境中起到了至关重要的作用。然而,由于手势信号的多样性和环境的复杂性,人工解读手势信号的效率和准确性存在一定局限。为了解决这一问题,本研究提出了一种基于深度学习的卷积神经网络(CNN)的交警手势识别系统,旨在实现对交警手势信号的自动识别与解释,从而提高交通管理的效率和准确性,提升道路安全性。
本系统通过PyQt5框架设计了用户友好的图形界面,使得整个识别过程不仅具备高效性,还能提供直观的交互方式。通过深度学习技术,尤其是卷积神经网络,系统能够对交警手势图像进行特征提取和分类。数据集包含了多种交警手势信号类别,具体包括:“从左侧启动车辆”、“从右侧启动车辆”、“在T型点启动车辆”、“从前方停车”、“从后方停车”、“从前后停车”和“从左右停车”。这些手势被精心标注并经过预处理,使得数据集具有较高的质量与代表性。
在训练过程中,卷积神经网络能够通过大量手势图像的学习,优化其参数,并逐步提升对不同环境下手势的识别能力。该系统不仅能在常规情况下准确识别手势,还能够在光线变化、图像模糊、遮挡等不利条件下进行鲁棒性识别。这使得系统在现实世界应用中,特别是在复杂交通场景下,具有较强的适应性和可靠性。
通过实验验证,所提出的手势识别系统在准确性、实时性等方面表现出色,识别率远高于传统方法。同时,系统能够快速响应并及时输出识别结果,为交通管理提供了有效支持。实验结果显示,该系统能够为交警指挥手势的实时解读提供准确反馈,大大减少了人为错误的发生,优化了交通流量的管理,并有助于智能交通系统的进一步发展。
本研究不仅在技术上为交警手势识别提供了可行的解决方案,而且在实际应用中展现了显著的优势。未来,结合更广泛的手势数据集和更复杂的交通场景,系统的准确性和可靠性有望进一步提升,为智能交通管理提供更加全面的技术支持。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
1.撰写内容
2.撰写流程
3.撰写优势
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
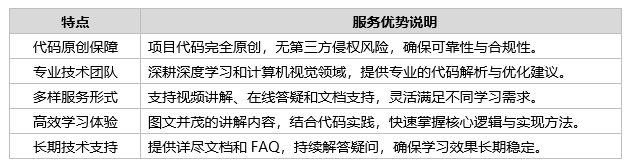
1.服务优势
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
项目数据
Tipps:传统的机器学习算法对图像进行识别等研究工作时,只需要很少的图像数据就可以开展工作。而在使用卷积神经网络解决研究的交警手势识别问题的关键其一在于搭建合适的神经网络,其二更需要具备大量优质的训练数据集,在大量的有标签数据不断反复对模型进行训练下,神经网络才具备我们所需要的分类能力,达到理想的分类效果。因此有一个质量较好的图像数据集至关重要。
数据集介绍:
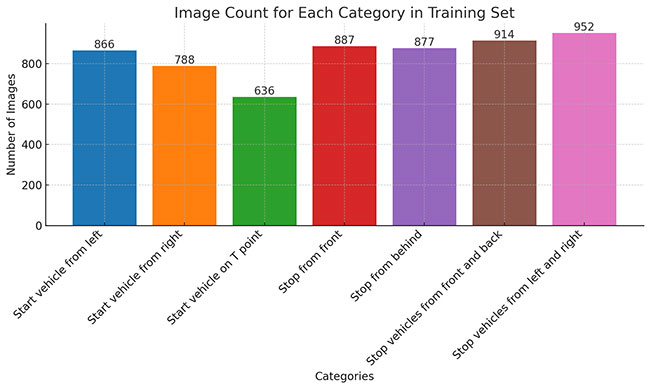
卷积神经网络的深度学习模型。数据集包含5920张图像,分布在7个类别中:”从左侧启动车辆”,”从右侧启动车辆”,”在T型点启动车辆”,” 从前方停车”,”从后方停车”,”从前后停车”,”从左右停车”。数据集可用于训练和验证深度学习模型,以实现交警手势的自动化分类识别,同时可以结合数据增强技术(如翻转、裁剪、噪声添加等)优化模型性能,为交警手势的研究提供重要支持。
数据集已被预先标注,每个类别的图像数量基本均衡,为训练和验证提供了稳定的基准。数据集被划分为训练集和测试集。
数据集划分
数据集已预先划分为两个部分:训练集和测试集,具体如下:
(1)训练集:”从左侧启动车辆 866张图”,”从右侧启动车辆 788张图”,”在T型点启动车辆 636张图”,” 从前方停车 887张图 “,”从后方停车 877张图”,”从前后停车 914张图”,”从左右停车 952张图”,共5920张图像。用于模型训练,通过最小化损失函数优化参数。
(2)测试集:”从左侧启动车辆 213张图”,”从右侧启动车辆 193张图”,”在T型点启动车辆 155张图”,” 从前方停车 218张图 “,”从后方停车 216张图”,”从前后停车 225张图”,”从左右停车 235张图”,共1455张图像。用于评估模型在未见数据上的表现
这种数据集划分方式有助于保证模型训练和评估的可靠性,确保各数据集独立,避免数据泄露和过拟合。
实验超参数设置
本实验中的主要超参数设置如下:
(1)学习率:0.0001,使用Adam优化器,能够自适应调整学习率,表现较好。
(2)批次大小:训练时为32,验证时为64,较小的批次大小有助于稳定训练并提高计算效率。
(3)优化器:使用Adam优化器,适用于稀疏数据和非凸问题。
(4)损失函数:采用交叉熵损失函数(CrossEntropyLoss),适用于多分类任务。
(5)训练轮数:设定为15轮,帮助模型逐渐收敛。
(6)权重初始化:使用预训练的VGG16和ResNet50权重进行迁移学习,加速收敛并提高分类性能。
这些超参数设置经过反复调试,以确保模型在验证集上表现良好。
硬件环境
我们使用的是两种硬件平台配置进行系统调试和训练:
(1)外星人 Alienware M16笔记本电脑:
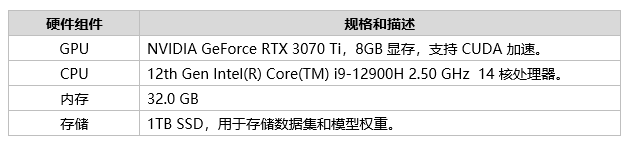
(2)惠普 HP暗影精灵10 台式机:

上面的硬件环境提供了足够的计算资源,能够支持大规模图像数据的训练和高效计算。GPU 的引入显著缩短了模型训练时间。
使用两种硬件平台进行调试和训练,能够更全面地验证系统的性能、适应性和稳定性。这种方法不仅提升了系统的鲁棒性和泛化能力,还能优化开发成本和效率,为实际应用场景的部署打下良好基础。
实验过程与结果分析
Tipps:分析VGG16和ResNet50两种模型在皮肤病分类任务中的实验结果。包括训练过程中的损失与准确率变化、模型性能对比、混淆矩阵(热力图)分析、过拟合与欠拟合的讨论,以及计算效率的分析。
训练过程中的损失与准确率变化
为了评估模型在训练过程中的表现,我们记录了每个epoch的训练损失、训练准确率以及验证损失、验证准确率。通过这些指标,我们可以观察到模型是否能够有效收敛,以及是否存在过拟合或欠拟合的情况。
1.1 VGG16模型训练过程
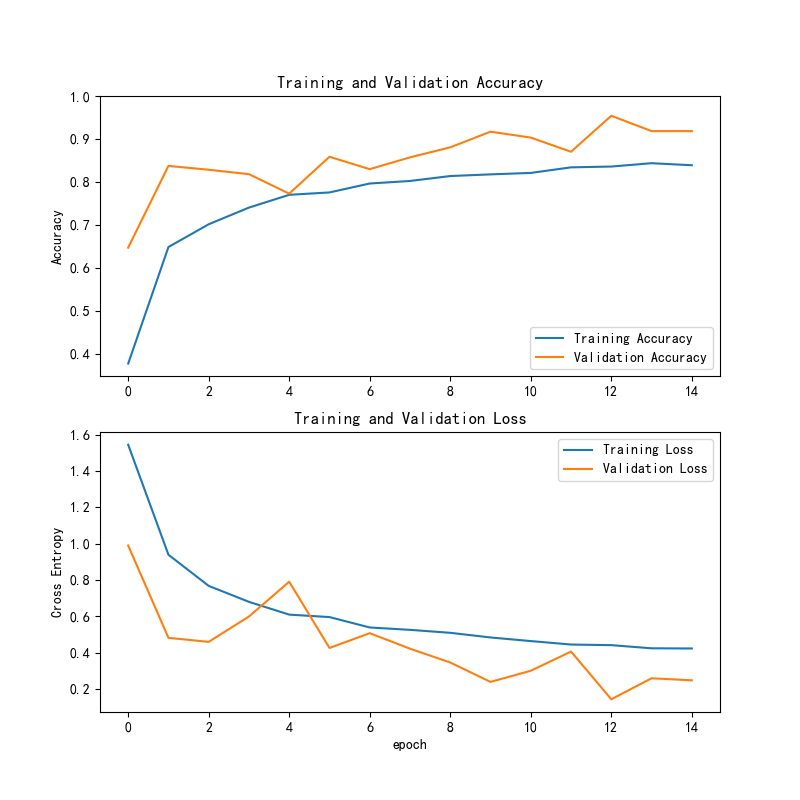
VGG16模型在训练过程中的损失和准确率曲线如下所示:
训练精度与验证精度:
(1)训练精度(蓝色曲线)随着训练周期的增加逐渐提升,从大约0.4提升到0.9左右,接近1。这表明模型在训练集上的表现逐步改进,并且越来越准确地识别数据。
(2)验证精度(橙色曲线)在前几个周期内上升较快,但之后出现了波动,并没有持续上升至与训练精度相同的水平。这种波动可能表示模型在验证集上存在一定的过拟合,尤其是在后期。
训练损失与验证损失:
(1)训练损失(蓝色曲线)从较高的值开始,随着训练进程的推进,损失逐渐减少,且最终趋于平稳。这表明模型在训练过程中不断优化,并减少了预测与实际标签之间的误差。
(2)验证损失(橙色曲线)在前几个周期显著下降,但之后表现出一定的波动,可能是由于训练过程中的过拟合或其他因素。验证损失的波动表明模型的泛化能力可能受到限制,尤其是在后期。
总体趋势:
(1)训练精度持续增长,表明模型在训练集上的表现越来越好,接近于完全正确。
(2)验证精度在前期表现良好,但在训练的后期出现波动,可能是由于过拟合。过拟合意味着模型在训练集上学习得很好,但在验证集上的表现不如训练集。
(3)训练损失逐渐减小,表明模型在训练数据上的误差降低。
(4)验证损失在训练过程中有波动,且最终趋于稳定,但验证集的损失并没有持续下降。
总结:
虽然模型在训练集上表现良好,训练精度逐渐提高且训练损失降低,但验证精度的波动和验证损失的波动表明存在一定的过拟合,需要进一步优化模型的泛化能力。
1.2 ResNet50模型训练过程
ResNet50模型在训练过程中的损失和准确率曲线如下所示:
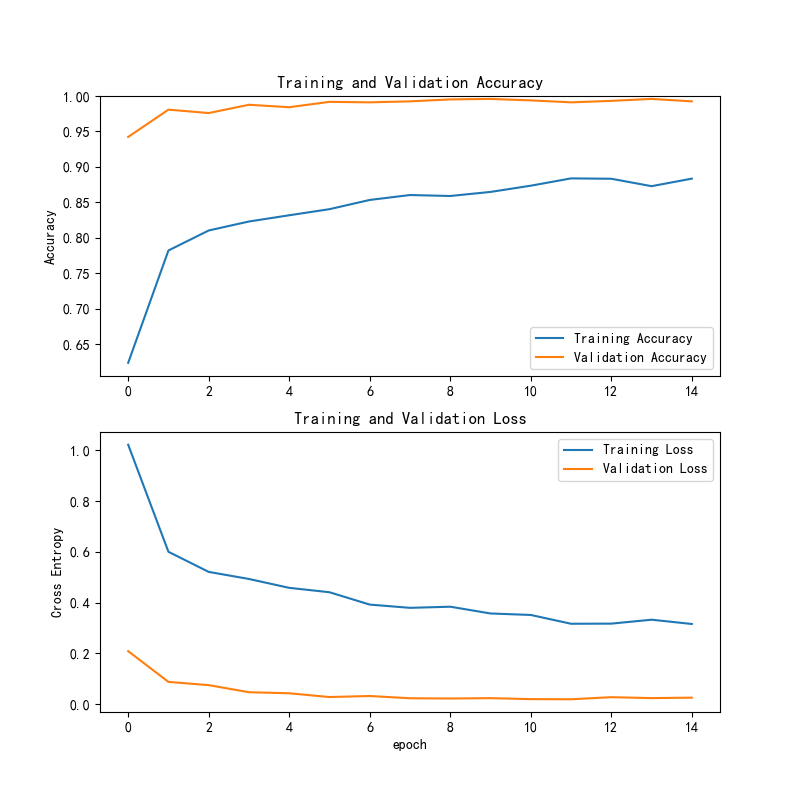
训练精度与验证精度:
(1)训练精度(蓝色曲线)随着训练周期增加,持续上升,并接近于100%。这表明模型在训练集上的表现逐步改善,能够准确地识别训练数据。
(2)验证精度(橙色曲线)在初期快速上升,最终趋于稳定,接近90%以上。尽管验证精度最终没有完全与训练精度相等,但其稳步上升仍表明模型的泛化能力较好。
训练损失与验证损失:
(1)训练损失(蓝色曲线)从较高的值开始,随着训练的进行不断减少,趋于稳定。这表明模型在训练数据上的误差逐渐降低,学习效果良好。
(2)验证损失(橙色曲线)也呈现下降趋势,但其下降幅度较小,且在后期稍微趋于平稳。较低且稳定的验证损失表明模型能够在验证集上保持较好的表现,但与训练损失相比,模型的泛化能力还有提升空间。
总体趋势:
(1)训练精度持续增长,表明模型在训练集上的表现越来越好,接近完全正确。
(2)验证精度在开始时快速提升,随后趋于稳定,最终达到较高的准确率,表明模型在未见过的数据上的泛化能力也较好。
(3)训练损失逐步减小,说明模型在训练集上的误差不断减小,训练效果持续优化。
(4)验证损失在初期显著下降,随后趋于平稳,验证损失在后期的波动提示可能存在一定的过拟合现象,但整体表现仍然稳定。
总结:
模型在训练集上表现优秀,训练精度持续提升,验证精度稳定增加,但后期的验证损失波动表明可能存在轻微的过拟合,仍可进一步优化泛化能力。
从损失和准确率的曲线来看,ResNet50在训练过程中的收敛速度和稳定性都优于VGG16,表明其更适合处理复杂的分类任务。
模型性能对比
训练精度和验证精度
(1)ResNet50:通常,ResNet50在训练精度和验证精度上表现较好。由于其残差网络结构,ResNet50能够有效避免梯度消失和梯度爆炸问题,训练过程中通常会显示出更快的收敛速度,且训练精度和验证精度在训练过程中较为稳定。
(2)VGG16:VGG16的表现可能在训练精度上不如ResNet50。虽然VGG16能够很好地学习到图像特征,但其较深的网络结构容易导致过拟合,尤其是在数据集较小的情况下。验证精度可能在一定周期后出现波动,尤其是在没有有效正则化的情况下。
训练损失与验证损失
(1)ResNet50:ResNet50通常具有较低的训练损失,并且验证损失也会随着训练周期的增加而逐步减少。由于残差连接的帮助,ResNet50的损失曲线较为平稳,收敛较快,通常能更好地应对过拟合问题。
(2)VGG16:VGG16的训练损失也会下降,但其验证损失的下降速度可能较慢,尤其在训练周期较长时,验证损失有时会停滞不前或波动较大。这通常意味着模型在验证集上的泛化能力较弱,需要更多的正则化或数据增强。
模型收敛速度
(1)ResNet50:由于其深层次的残差连接,ResNet50在训练时能够更快地收敛,尤其在深层网络中,这种结构能有效缓解梯度消失问题。通常,ResNet50能在较少的训练周期内达到较高的训练精度和验证精度。
(2)VGG16:VGG16的收敛速度较慢,特别是在训练数据较少或没有使用预训练模型的情况下。由于其较深的结构(没有残差连接),其训练可能需要更多的周期才能达到较好的收敛效果。
计算性能
(1)ResNet50:ResNet50的计算量较大,可能需要更长的训练时间,但由于其深层网络结构和残差连接,能够有效防止梯度消失并提高训练效果。
(2)VGG16:VGG16的计算量相对较小,训练速度较快,适合较为简单的任务,但在复杂任务中,容易受到过拟合的影响。
综合评估
(1)ResNet50:在较为复杂的任务中,ResNet50能够提供较好的性能,尤其在避免过拟合和提高泛化能力方面表现出色。对于交警手势识别这样的任务,ResNet50能够稳定提供较高的验证精度。
(2)VGG16:虽然VGG16在训练精度上有不错的表现,但由于其结构相对简单,对于一些具有复杂特征的任务,可能会出现过拟合现象,验证集上的表现不如ResNet50。
总结:
(1)ResNet50在交警手势识别任务中表现更为优秀,特别是在验证准确率和泛化能力方面。
(2)VGG16虽然在训练集上表现良好,但其验证精度波动较大,可能会出现过拟合。
混淆矩阵分析(热力图)
为了更全面地分析模型的分类性能,我们生成了混淆矩阵并将其可视化为热力图,帮助我们直观地了解模型在哪些类别上表现较好,在哪些类别上存在误分类。
1.VGG16的热力图:
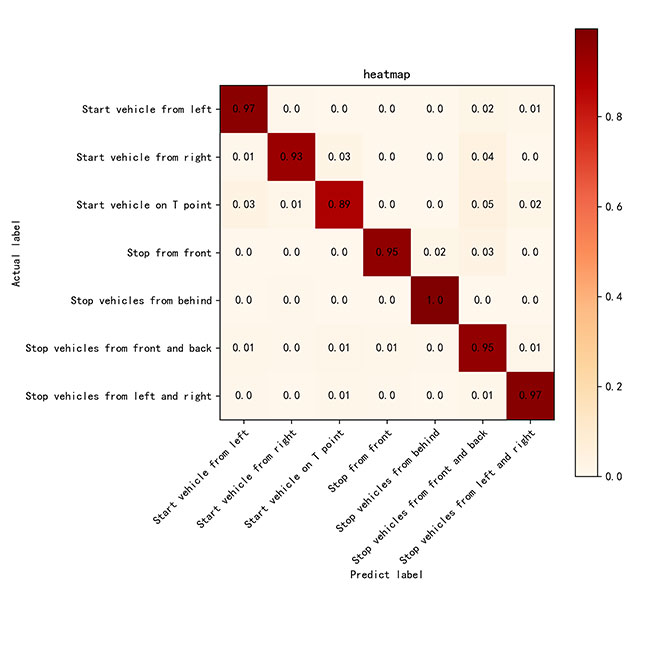
(1)优点:该模型在大多数类别上的预测非常准确,表现出色,尤其在“Stop vehicles from behind”类,几乎没有误分类。
(2)改进方向:改进方向主要集中在减少类别之间的混淆、提高模型对小类别的识别能力,以及进一步优化模型以应对更复杂的类别区分任务。
2.ResNet50的热力图:
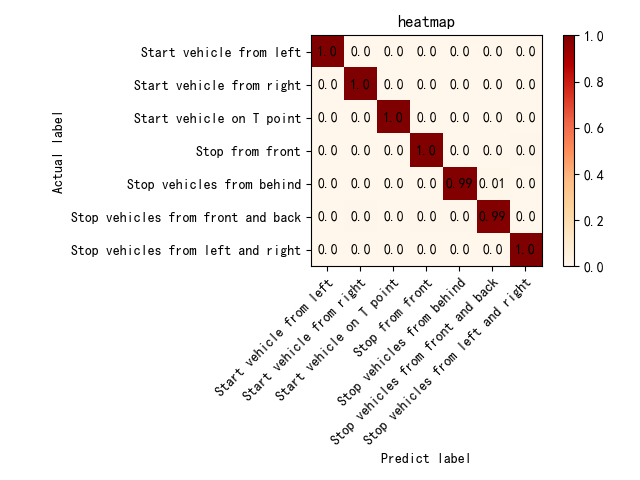
(1)优点:该模型在各类别上的预测表现非常优秀,绝大部分类别的预测准确率达到了100%或接近100%,表现出色。
(2)改进方向:改进方向主要集中在少数类别的误分类上,尽管误分类率低,但在某些情况下可能会有轻微的混淆。针对这类问题,数据增强、模型架构调整或更多的训练样本可以进一步提升模型性能。
计算效率分析
(1)ResNet50通常在计算效率、训练时间、推理速度和内存使用方面优于VGG16。尽管其网络较深,但由于残差连接的存在,训练时的梯度消失问题得到缓解,使得ResNet50能更快地收敛并达到较好的性能。
(2)VGG16由于其庞大的参数量和较浅的结构,在训练时需要更多的计算资源和内存,同时推理速度也较慢。对于一些硬件受限的环境,VGG16可能不如ResNet50高效。
如果计算效率是项目的关键考虑因素,ResNet50 更适合用于大规模训练任务,尤其是在时间有限的情况下。
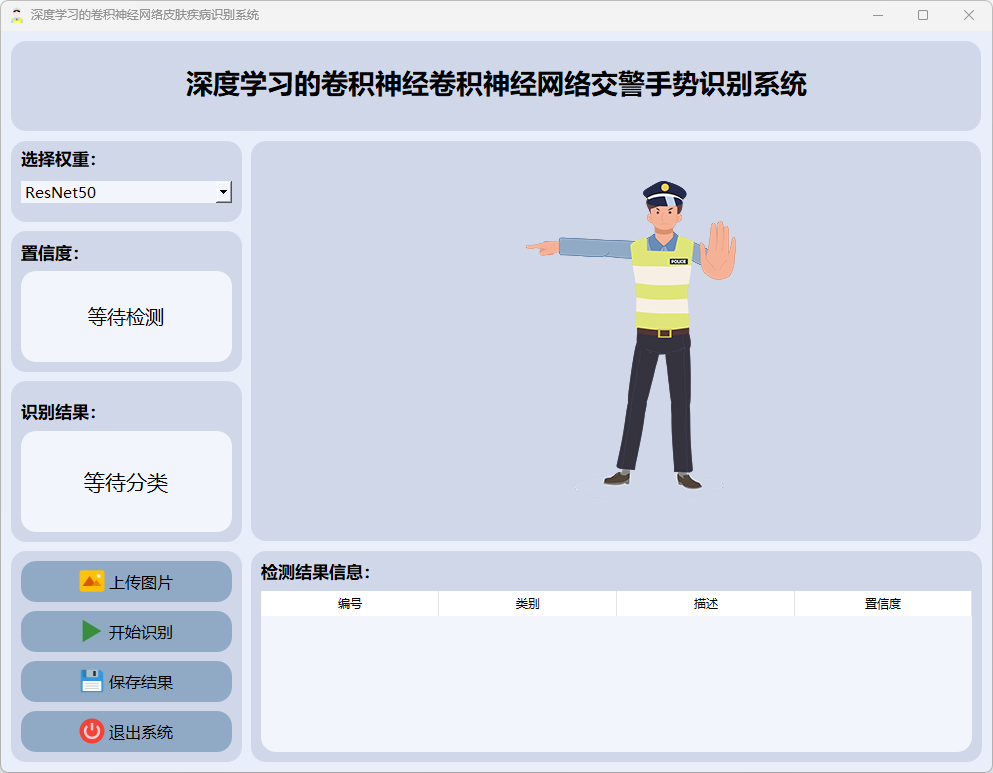
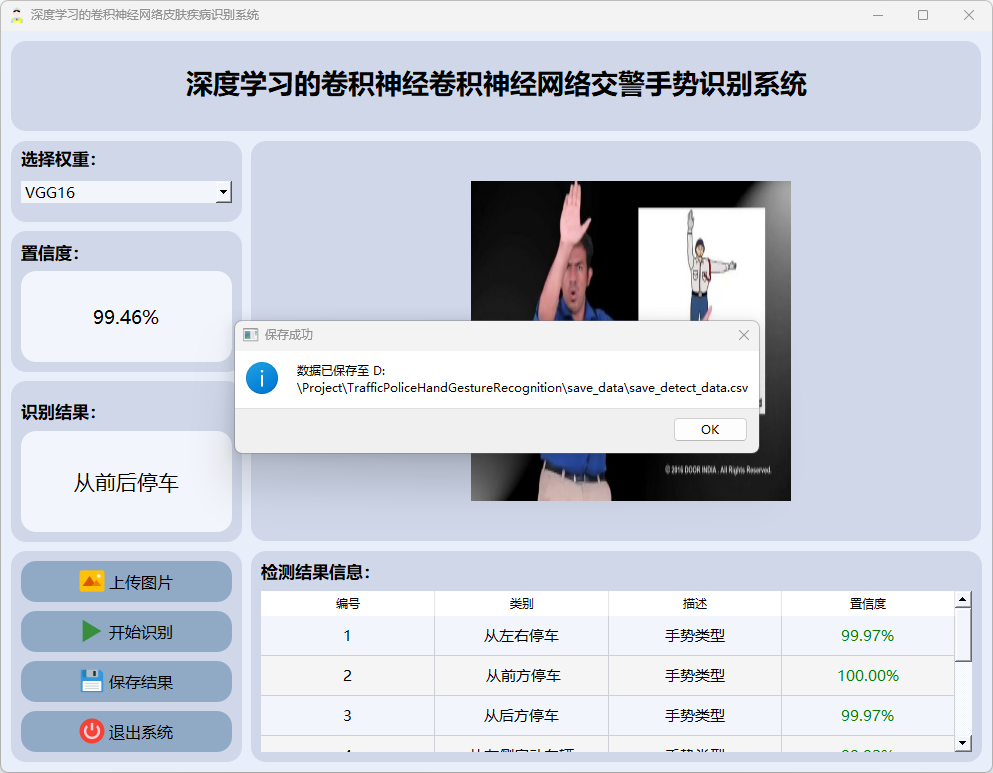
运行效果
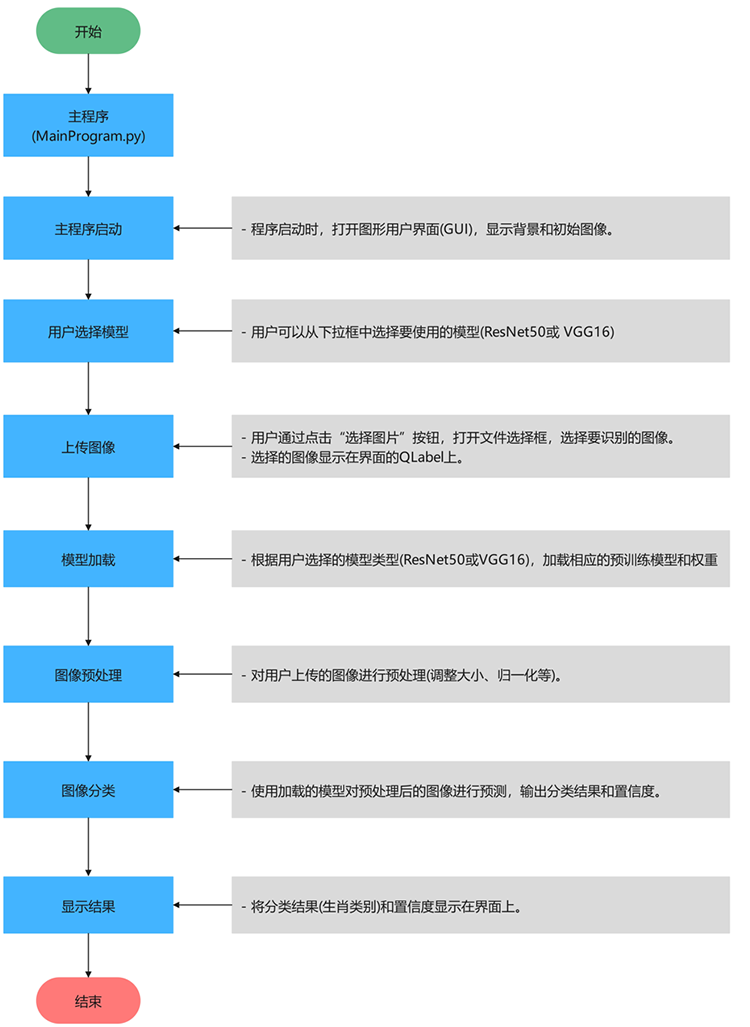
– 运行 MainProgram.py
1.ResNet50模型运行:
(1)主界面
(2)从左侧启动车辆

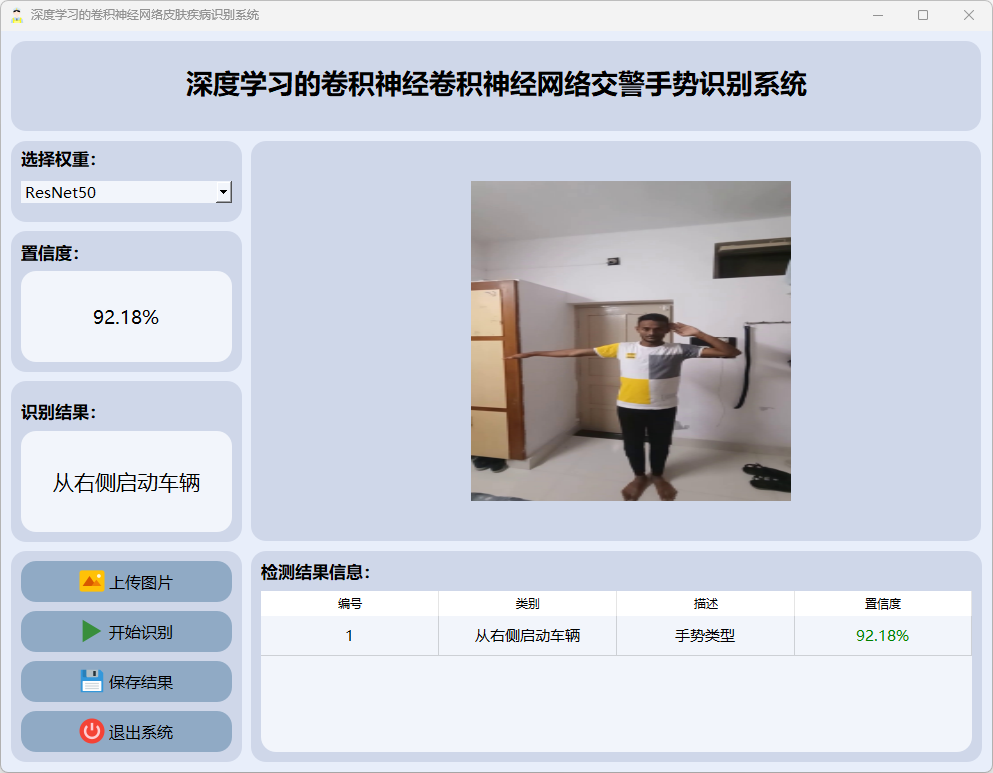
(3)从右侧启动车辆
(4)在T型点启动车辆

(5)从前方停车

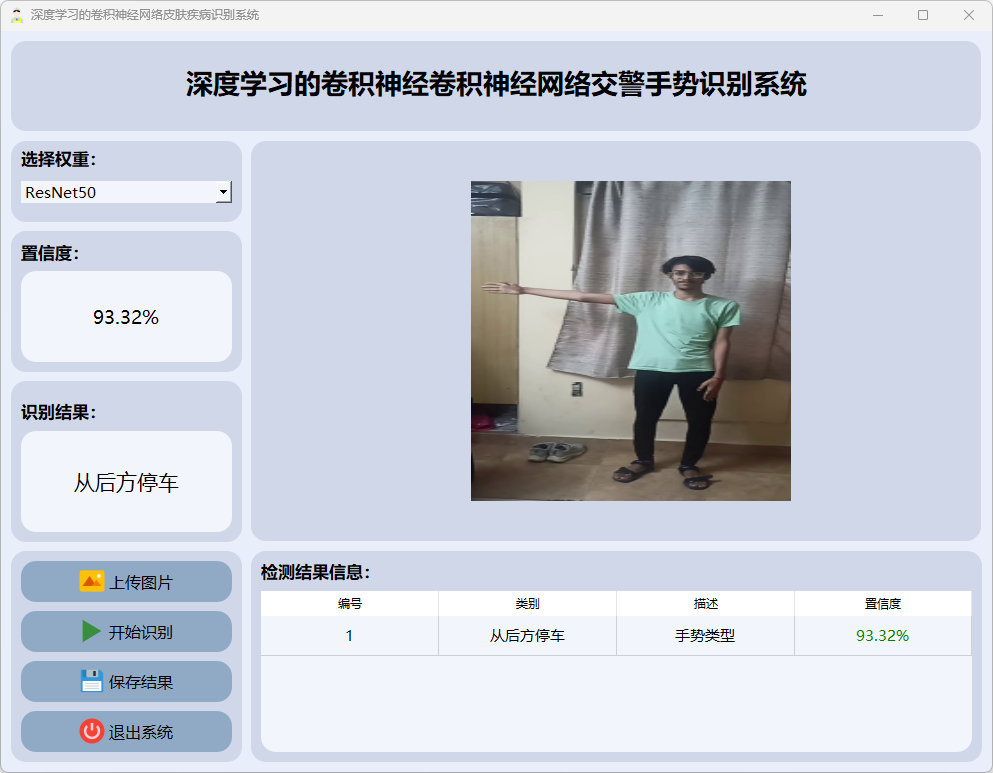
(6)从后方停车
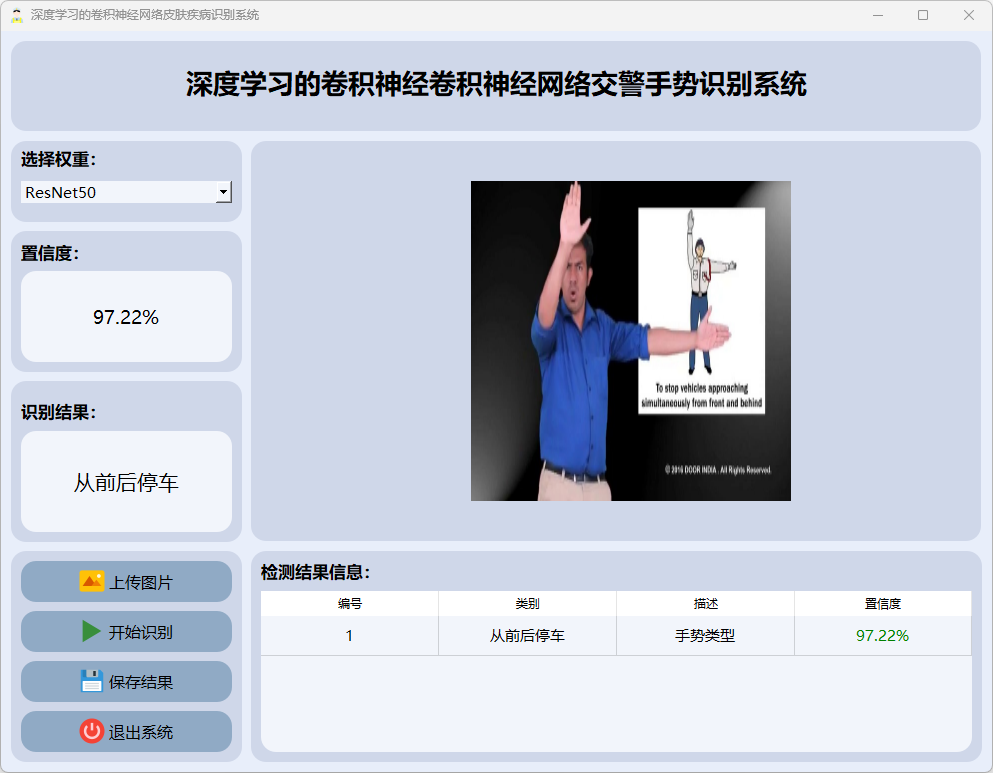
(7)从前后停车
(8)从左右停车

2.VGG16模型运行:
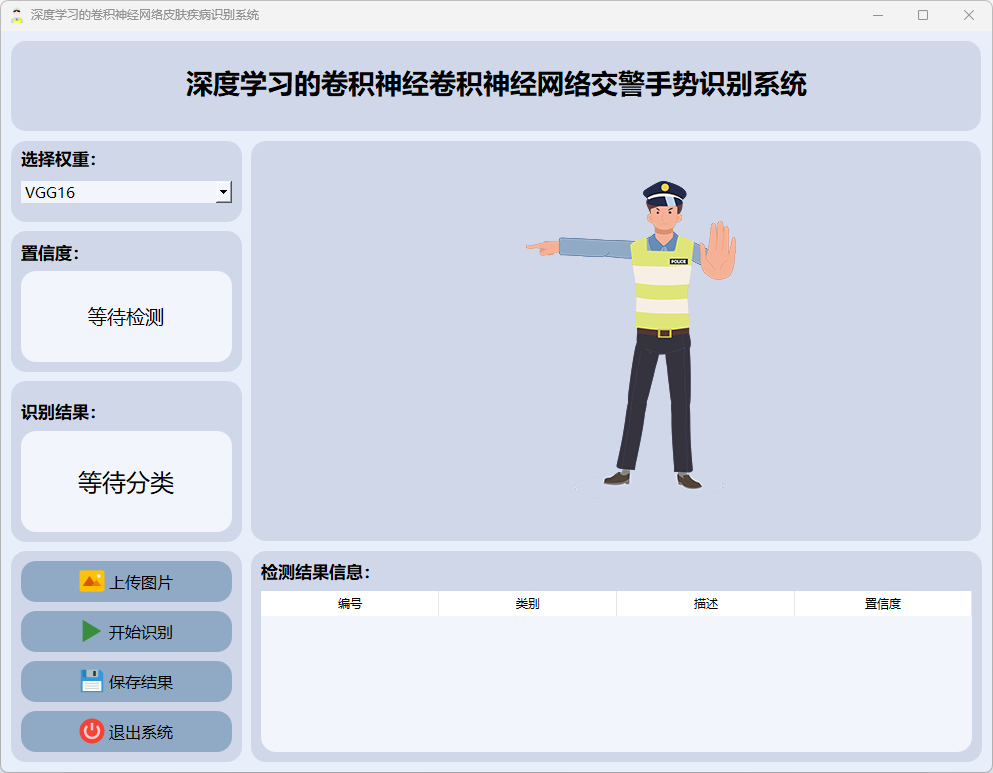
(1)主界面
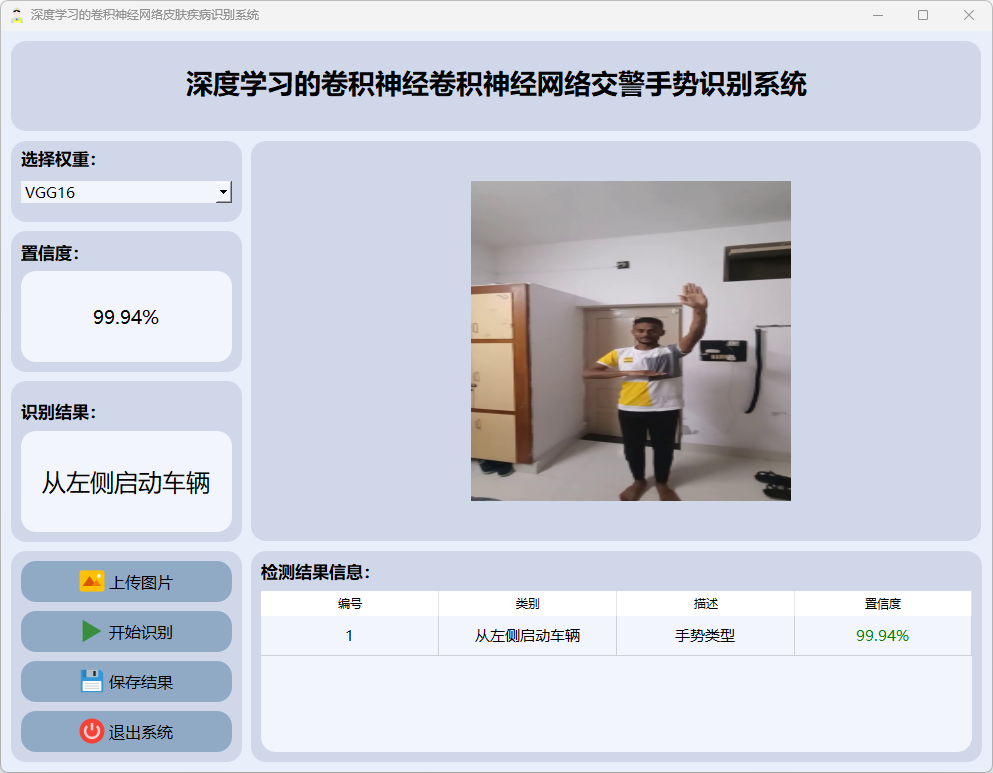
(2)从左侧启动车辆
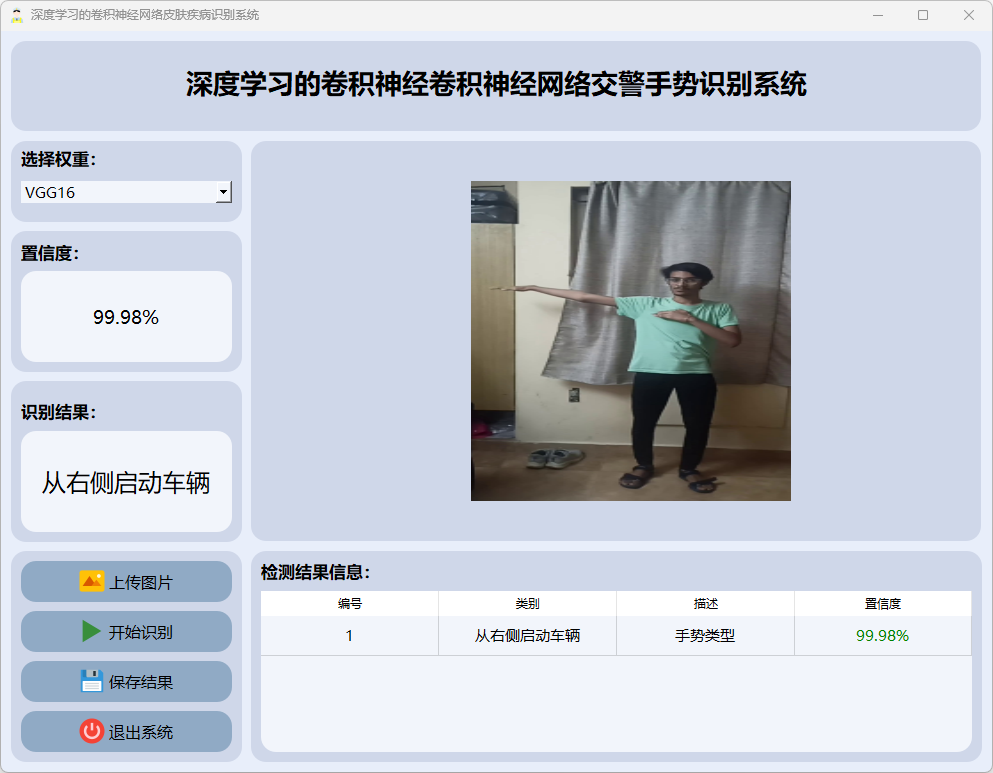
(3)从右侧启动车辆
(4)在T型点启动车辆

(5)从前方停车

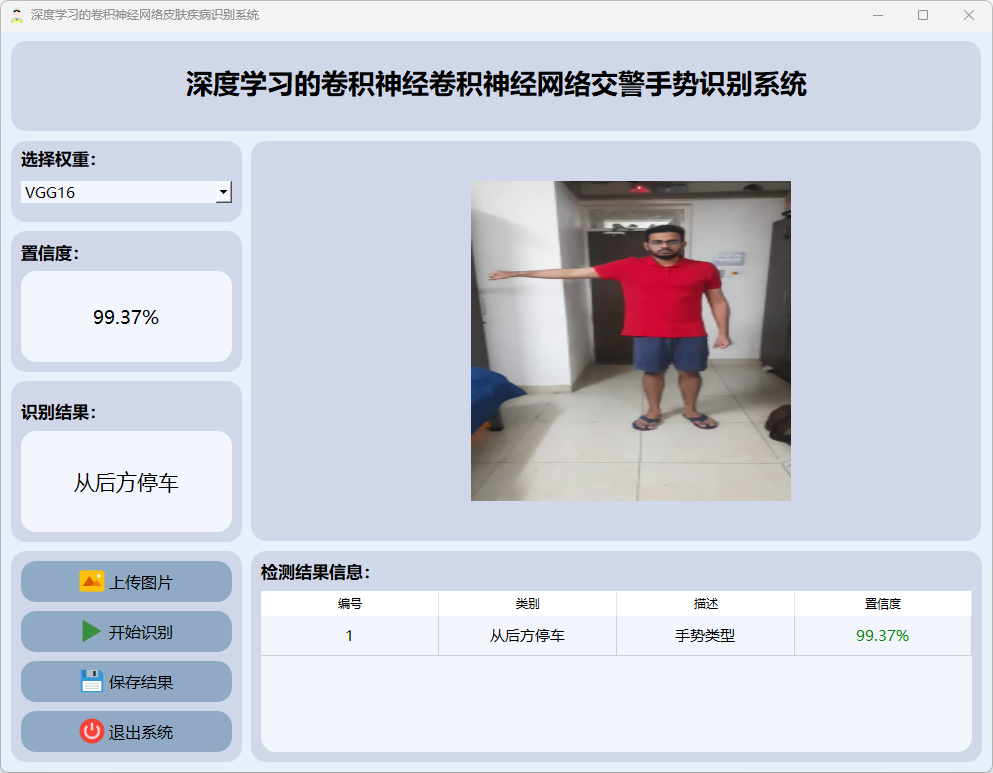
(6)从后方停车
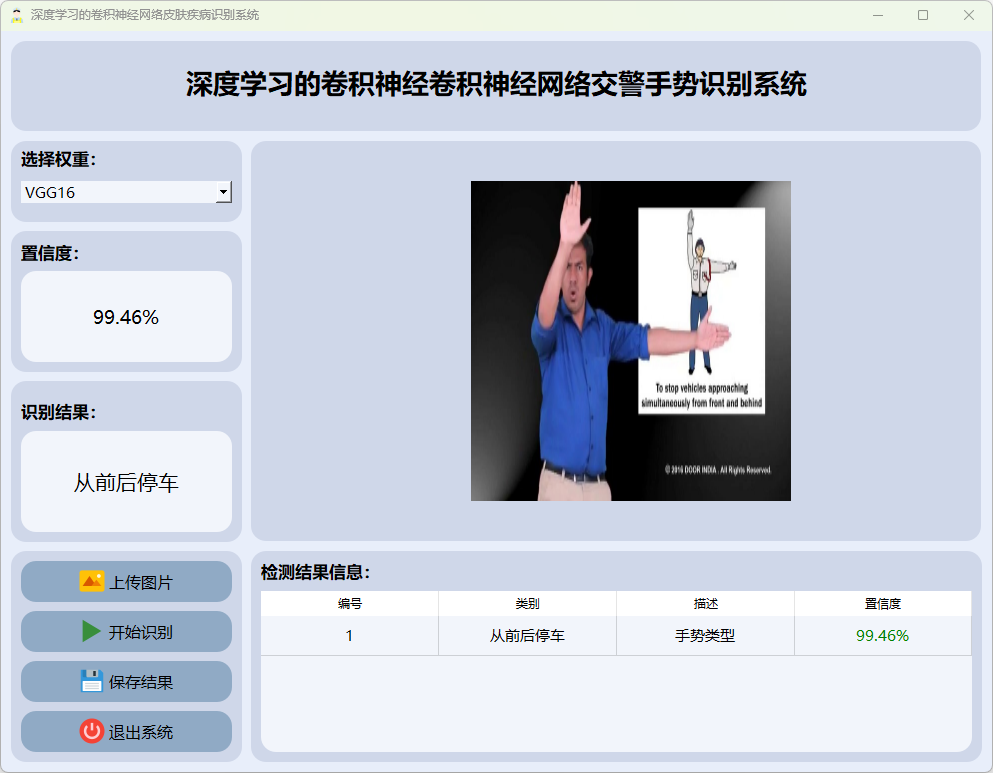
(7)从前后停车
(8)从左右停车

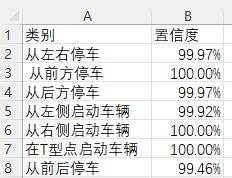
3.检测结果保存
点击保存按钮后,会将当前选择的图检测结果进行保存。
检测的结果会存储在save_data目录下。
图片文件保存的csv文件内容如下:
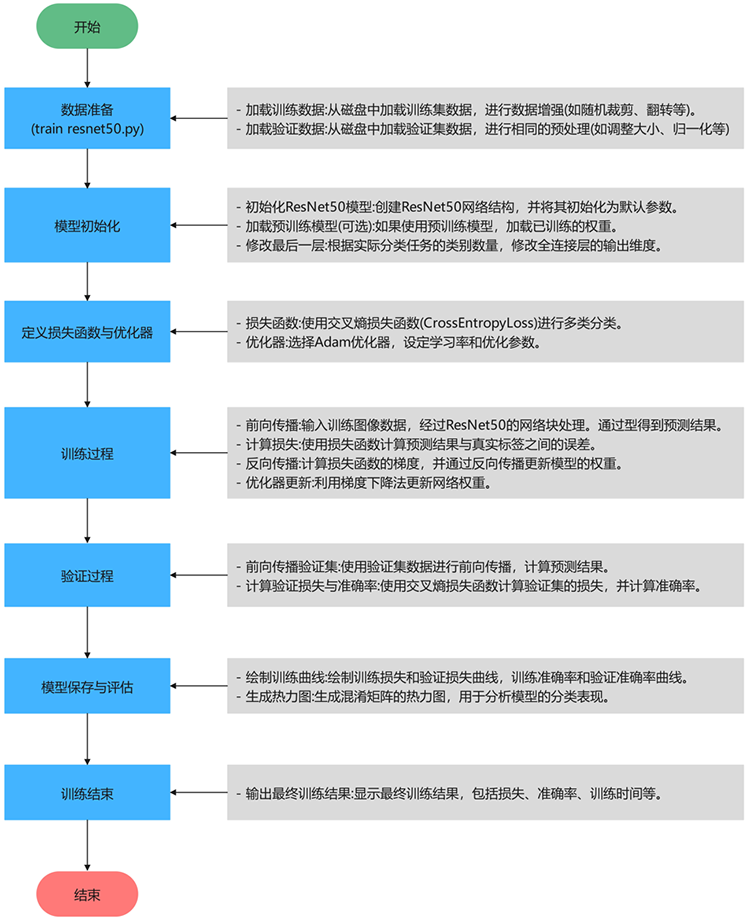
– 运行 train_resnet50.py
这段代码的主要目的是在直接运行该脚本时,加载指定路径下的训练集和测试集,初始化一个 MainProcess 实例并训练模型(ResNet50),设置训练的轮数为 15 轮。
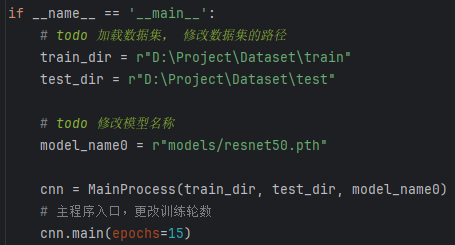
数据集路径设置:
(1)train_dir = r”D:\Dataset\train”:设置训练集数据的路径。
(2)test_dir = r”D:\Dataset\test”:设置测试集数据的路径。
模型路径设置:
(1)model_name0 = r”models/resnet50.pth”:指定训练模型的文件路径,这里是 resnet50.pth 模型的路径,用于加载预训练的 ResNet50 权重或保存训练后的模型。
实例化MainProcess类:
(1)cnn = MainProcess(train_dir, test_dir, model_name0):通过传入训练集路径、测试集路径和模型路径,创建 MainProcess 类的实例 cnn,这个类负责数据加载、模型训练、验证等操作。
调用主函数main进行训练:
(1)cnn.main(epochs=15):调用 cnn 对象的 main 方法,开始训练模型。epochs=15 表示模型训练将进行50轮(每轮遍历整个训练集一次)。该方法将包括模型的训练过程、损失计算、验证等步骤
训练日志结果
ResNet50日志结果
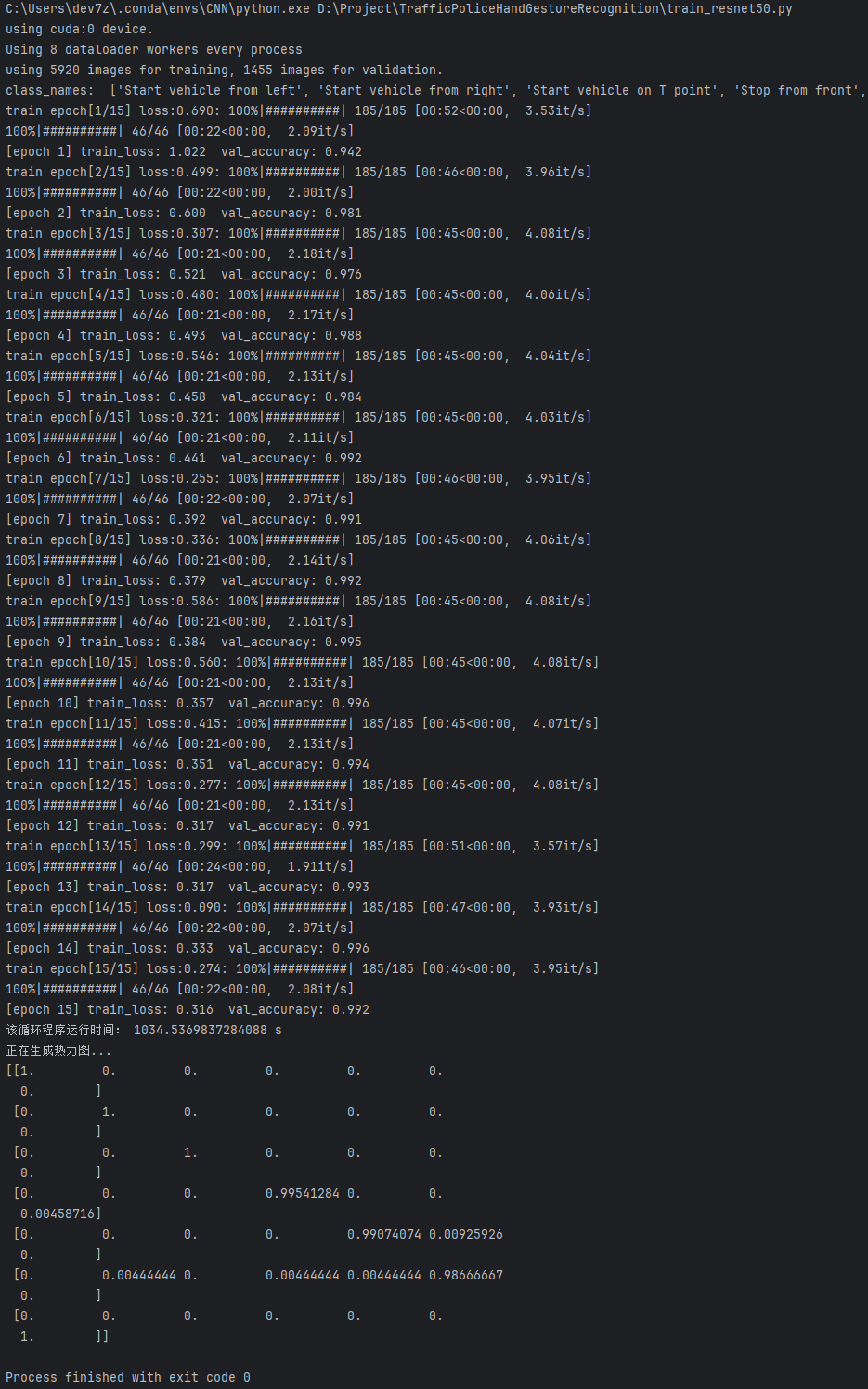
这张图展示了使用ResNet50进行模型训练的详细过程和结果。
配置信息:
(1)模型在训练了15轮后,总共耗时17.2分钟。
(2)本次训练使用了GPU设备,具体是CUDA设备0。
训练损失:
(1)训练损失显示了随着训练的进行,模型在训练集上的误差逐渐减小。
(2)在每个周期(epoch)中,训练损失逐步减少。例如,第一个周期的训练损失为1.022,而最后一个周期的损失为0.316,表明模型在训练过程中逐步优化,误差逐渐降低。
验证准确率:
(1)验证准确率是衡量模型在未见过的数据(验证集)上表现的指标,较高的验证准确率表示模型具有较强的泛化能力。
(2)验证准确率在训练过程中不断上升,最终达到了0.992,表现非常出色。特别是在前几个周期中,验证准确率迅速提升,从0.942增加到接近1.0,表明模型能够快速学习并适应数据。
训练速度:
(1)训练速度反映了每秒处理的图像数量。该模型的训练速度在不同周期间有所变化,约为3.5到4.1图像/秒之间。
(2)例如,第一个周期的训练速度为3.51图像/秒,后期训练速度达到了4.08图像/秒,这表明在模型训练过程中,计算资源得到了有效利用,训练过程平稳且高效。
模型表现:
(1)模型在训练过程中的损失持续下降,验证准确率持续上升,说明该模型在交警手势识别任务中表现优异。特别是在第9个周期时,模型的验证准确率已经达到99.5%,在接下来的周期中进一步稳定。
(2)最终的验证准确率达到 99.2%,说明模型在交警手势的识别中具有很强的能力,能够准确处理各种手势。
完成信息:
(1)Process finished with exit code 0:表示整个验证过程顺利完成,没有报错。
总结:
ResNet50模型通过深度学习优化,训练损失持续降低,验证准确率达到99.2%,表现出色且训练过程高效。
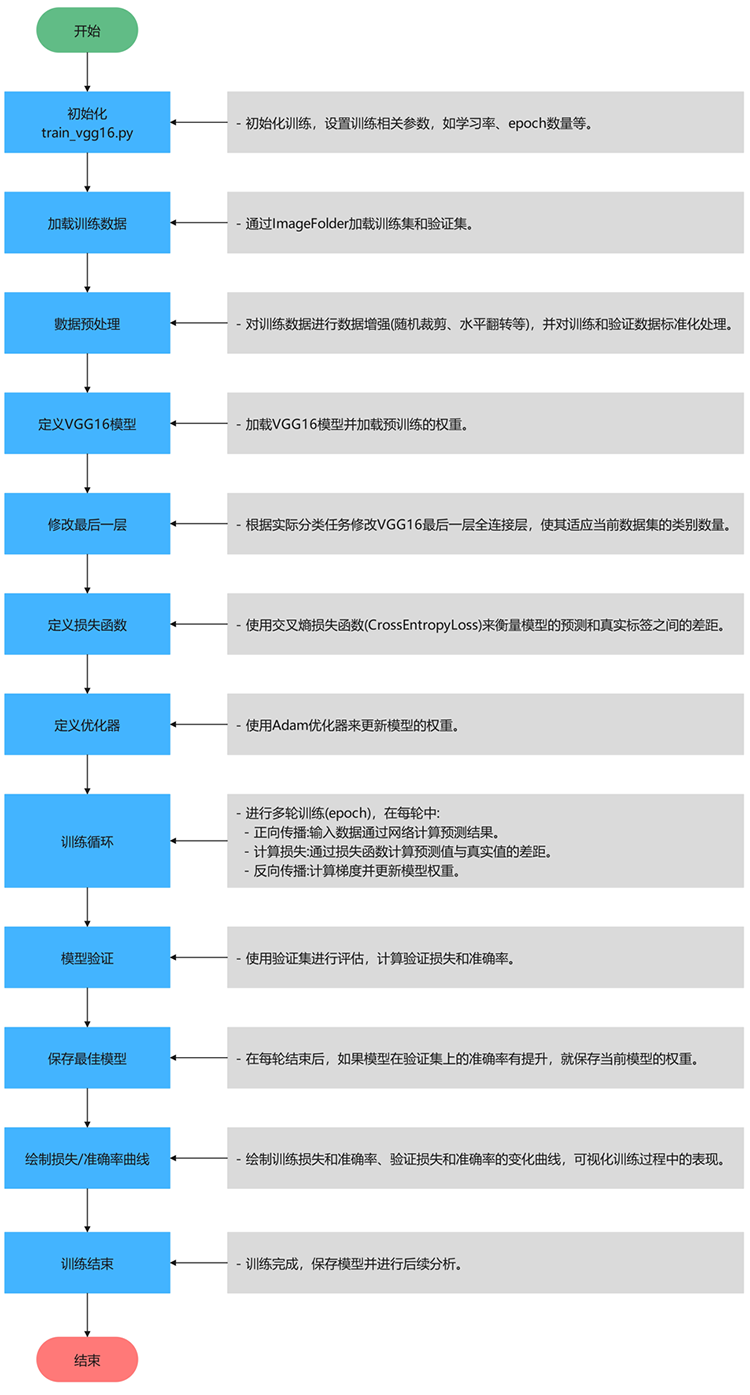
– 运行 train_vgg16.py
这段代码的主要目的是在直接运行该脚本时,加载指定路径下的训练集和测试集,初始化一个 MainProcess 实例并训练模型(VGG16),设置训练的轮数为 15 轮。
数据集路径设置:
(1)train_dir = r”D:\Dataset\train”:设置训练集数据的路径。
(2)test_dir = r”D:\Dataset\test”:设置测试集数据的路径。
模型路径设置:
(1)model_name0 = r”models/vgg16.pth”:指定训练模型的文件路径,这里是 vgg16.pth 模型的路径,用于加载预训练的 VGG16 权重或保存训练后的模型。
实例化 MainProcess 类:
(1)cnn = MainProcess(train_dir, test_dir, model_name0):通过传入训练集路径、测试集路径和模型路径,创建 MainProcess 类的实例 cnn,这个类负责数据加载、模型训练、验证等操作。
调用主函数main进行训练:
(1)cnn.main(epochs=15):调用 cnn 对象的 main 方法,开始训练模型。epochs=15 表示模型训练将进行50轮(每轮遍历整个训练集一次)。该方法将包括模型的训练过程、损失计算、验证等步骤
训练日志结果
VGG16日志结果
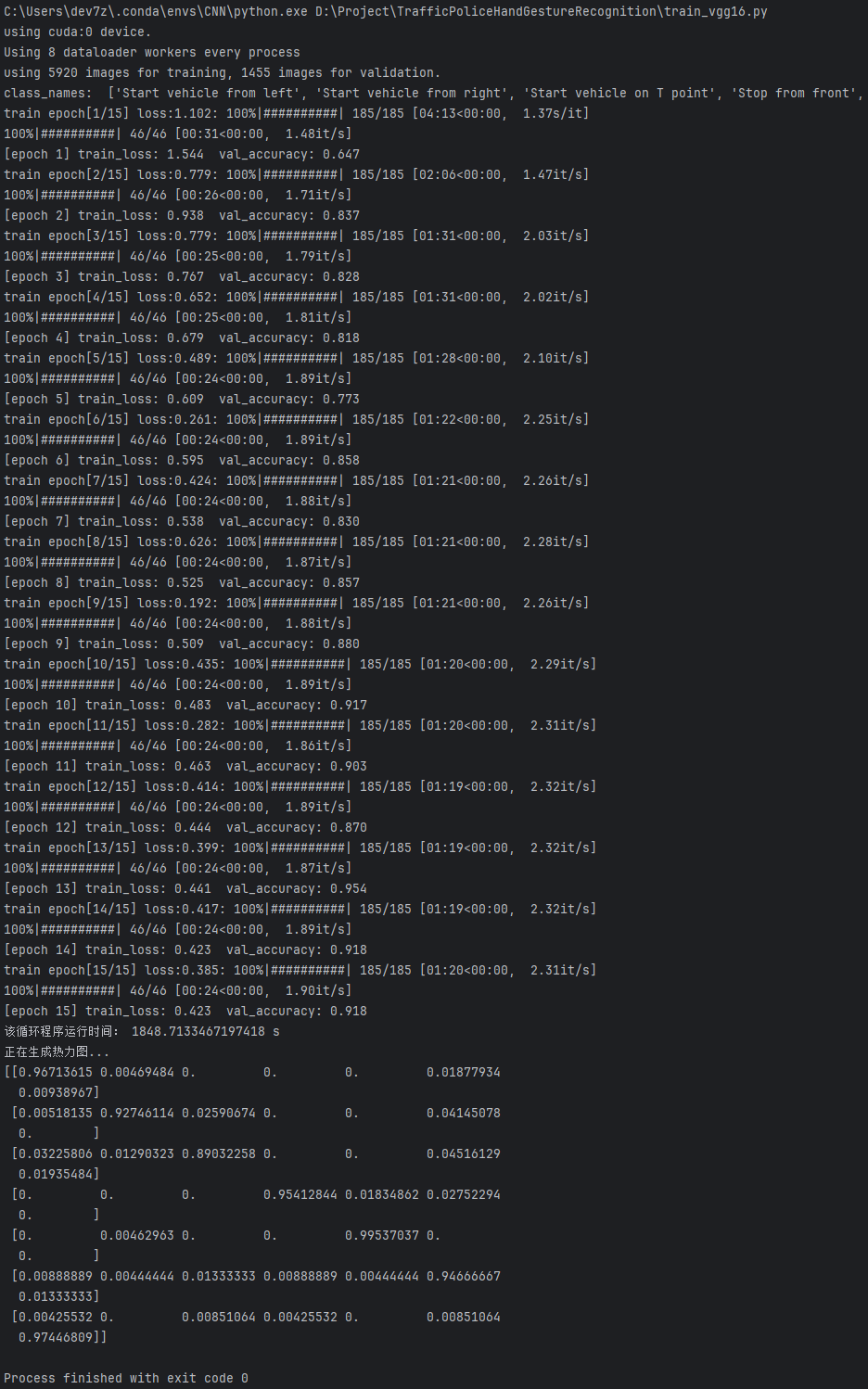
这张图展示了使用VGG16进行模型训练的详细过程和结果。
配置信息:
(1)模型在训练了15轮后,总共耗时30分钟。
(2)本次训练使用了GPU设备,具体是CUDA设备0。
训练损失:
(1)训练损失是衡量模型在训练过程中与目标之间的差异,通常较低的训练损失表示模型在训练集上有良好的表现。
(2)从训练日志中可以看到,训练损失逐渐减小。例如,第一个周期的训练损失为1.102,而第15个周期降低到0.385。这表明模型通过不断的学习调整,减少了与实际标签之间的误差。
验证准确率:
(1)验证准确率表示模型在验证集上的表现,能够反映模型的泛化能力。
(2)验证准确率在训练过程中稳定提升,从第一个周期的0.647提升到最后一个周期的0.918。这表明模型在验证集上的准确度不断提升,说明模型能较好地学习到数据的特征,并具有较强的泛化能力。
训练速度:
(1)每个周期的训练速度在2.2至2.3图像/秒之间变化,表示硬件运行在一个稳定的速率下进行训练,训练过程中的计算资源利用率较高。
模型表现:
(1)模型的表现主要体现在训练损失和验证准确率上。训练损失持续下降,验证准确率稳定上升,表明模型在训练过程中不断优化,并且能够在验证集上取得较高的准确性。
(2)最终,模型的验证准确率达到91.8%,这表示在交警手势识别任务中,模型能够有效识别和分类手势。
完成信息:
(1)Process finished with exit code 0:表示整个验证过程顺利完成,没有报错。
总结:
模型通过深度学习有效地优化了交警手势识别任务,训练损失逐步降低,验证准确率稳定提升,最终达到91.8%的准确率,表现优异且训练效率较高。
远程部署
Tipps:购买后可有偿协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
– 客服QQ:3666308803
项目文件
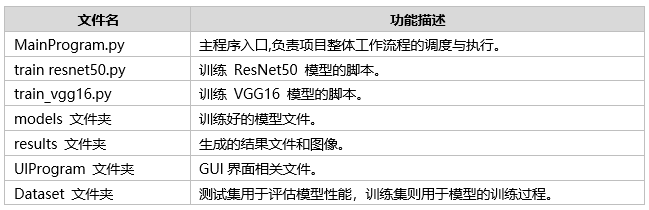
文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)