

随着全球环境污染问题的日益严重,漂浮物垃圾,尤其是渔业废料、玻璃废料、金属废料、自然废料、油污泄漏、塑料废料和可回收废料,对水体环境造成了极大的危害。为了更好地识别和分类这些漂浮物,本文提出了一种基于YOLOv10深度学习的智慧环保漂浮物目标检测系统。该系统结合了YOLOv10(You Only Look Once)目标检测算法的强大优势,利用PyQt5框架实现了可视化用户界面,并通过构建一个专门的数据集对模型进行了训练。
项目信息
编号:PDV-113
大小:7.18G
运行条件
Python开发环境:
– PyCharm的安装包:PyCharm: Python IDE for Professional Developers
– PyCharm的历史安装包:PyCharm: Python IDE for Professional Developers
– Anaconda的安装包:Anaconda | Start Coding Immediately
– Python开发版本:Python==3.9
需要安装依赖包:
– pip install PyQt5== 5.15.11
– pip install Pillow==10.4.0
– pip install opencv-python==4.10.0.84
– pip install torch==2.4.0
– pip install torchvision==0.19.0
– pip install numpy== 1.26.4
– pip install matplotlib==3.9.2
项目介绍
随着全球环境污染问题的日益严重,漂浮物垃圾,尤其是渔业废料、玻璃废料、金属废料、自然废料、油污泄漏、塑料废料和可回收废料,对水体环境造成了极大的危害。为了更好地识别和分类这些漂浮物,本文提出了一种基于YOLOv10深度学习的智慧环保漂浮物目标检测系统。该系统结合了YOLOv10(You Only Look Once)目标检测算法的强大优势,利用PyQt5框架实现了可视化用户界面,并通过构建一个专门的数据集对模型进行了训练。
本文通过收集并标注各种类型的漂浮物数据,构建了一个包含渔业废料、玻璃废料、金属废料、自然废料、油污泄漏、塑料废料和可回收废料等多种类别的专用数据集。然后,采用YOLOv10算法对数据集进行了训练,优化了模型的准确性和速度,最终实现了高效、准确的漂浮物目标检测。系统还通过PyQt5开发了一个图形用户界面(GUI),使得用户能够直观地查看实时检测结果,并提供了漂浮物类型的分类和定位信息。
实验结果表明,该系统在检测精度和处理速度上均达到了较高水平。该智慧环保漂浮物目标检测系统为环境保护领域提供了一个有效的解决方案,有助于提高水体垃圾的清理效率,减少漂浮物对生态环境的污染,并为智能环保管理系统的进一步发展提供了技术支持。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
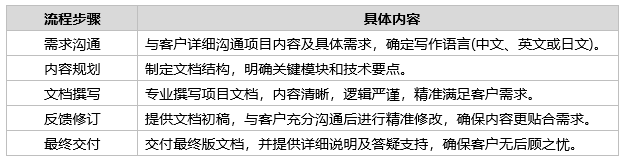
– 点击查看:写作流程
1.撰写内容
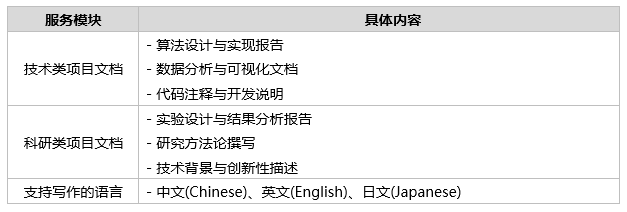
2.撰写流程
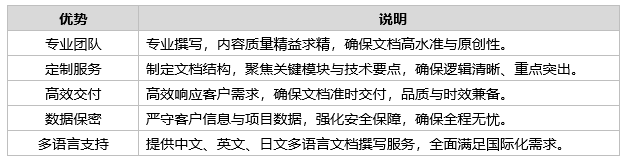
3.撰写优势
4.适用人群
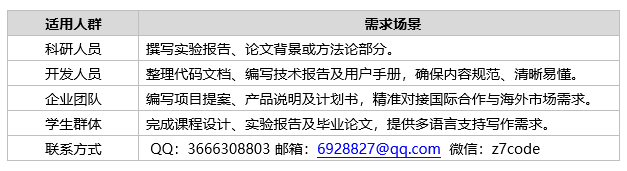
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
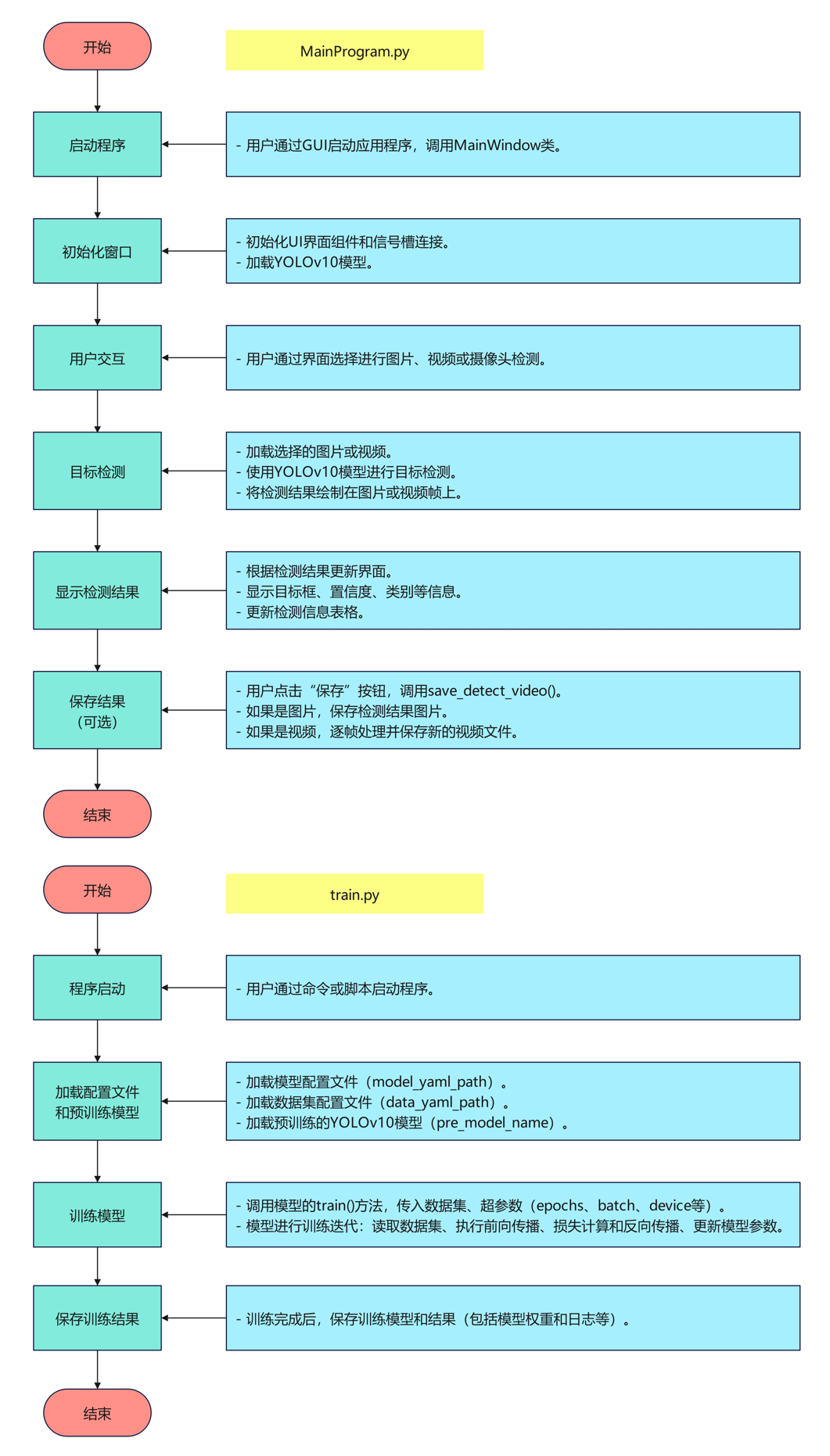
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
1.服务优势
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
项目数据
Tipps:通过搜集关于数据集为各种各样的水面漂浮物图像,并使用Labelimg标注工具对每张图片进行标注,分7个检测类别,分别是’渔业废料漂浮物’,’玻璃废料漂浮物料’,’金属废料漂浮物料’,’自然废料漂浮物’,’油污泄漏漂浮物’,’塑料废料漂浮物’,’可回收废料漂浮物’。
目标检测标注工具
(1)labelimg:开源的图像标注工具,标签可用于分类和目标检测,它是用python写的,并使用Qt作为其图形界面,简单好用(虽然是英文版的)。其注释以 PASCAL VOC格式保存为XML文件,这是ImageNet使用的格式。此外,它还支持 COCO数据集格式。
(2)安装labelimg 在cmd输入以下命令 pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple
![]()
结束后,在cmd中输入labelimg
![]()
初识labelimg
![]()
打开后,我们自己设置一下
在View中勾选Auto Save mode
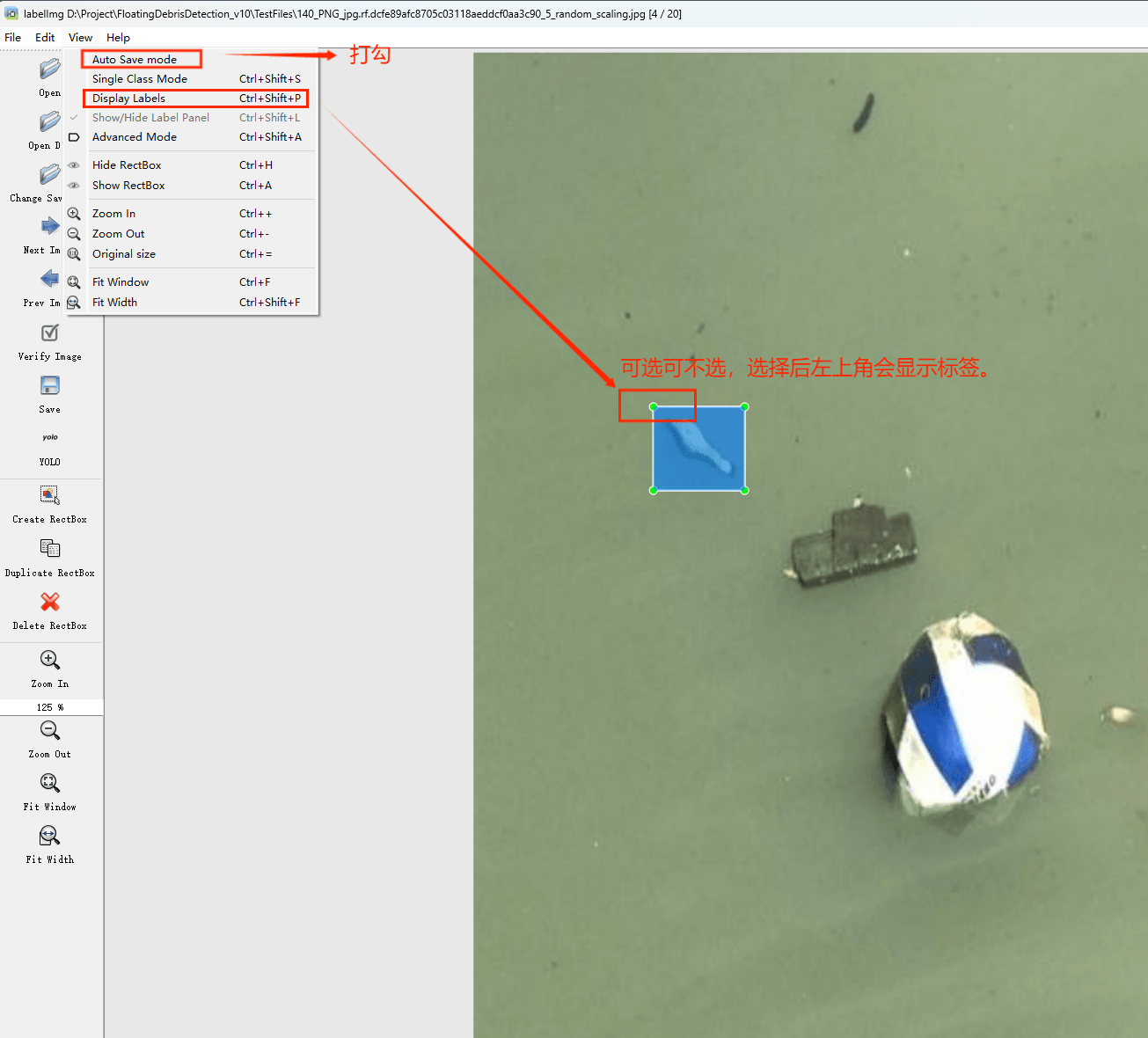
接下来我们打开需要标注的图片文件夹
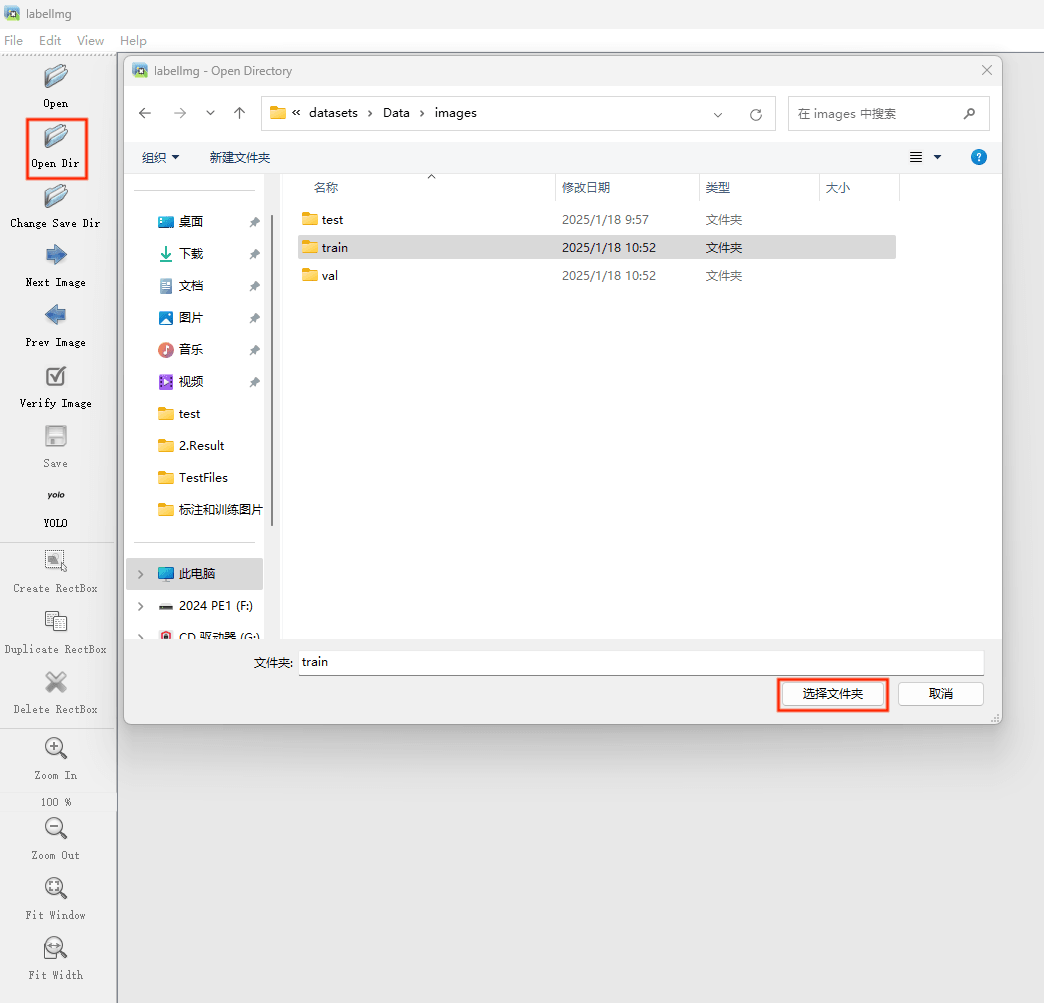
并设置标注文件保存的目录(上图中的Change Save Dir)
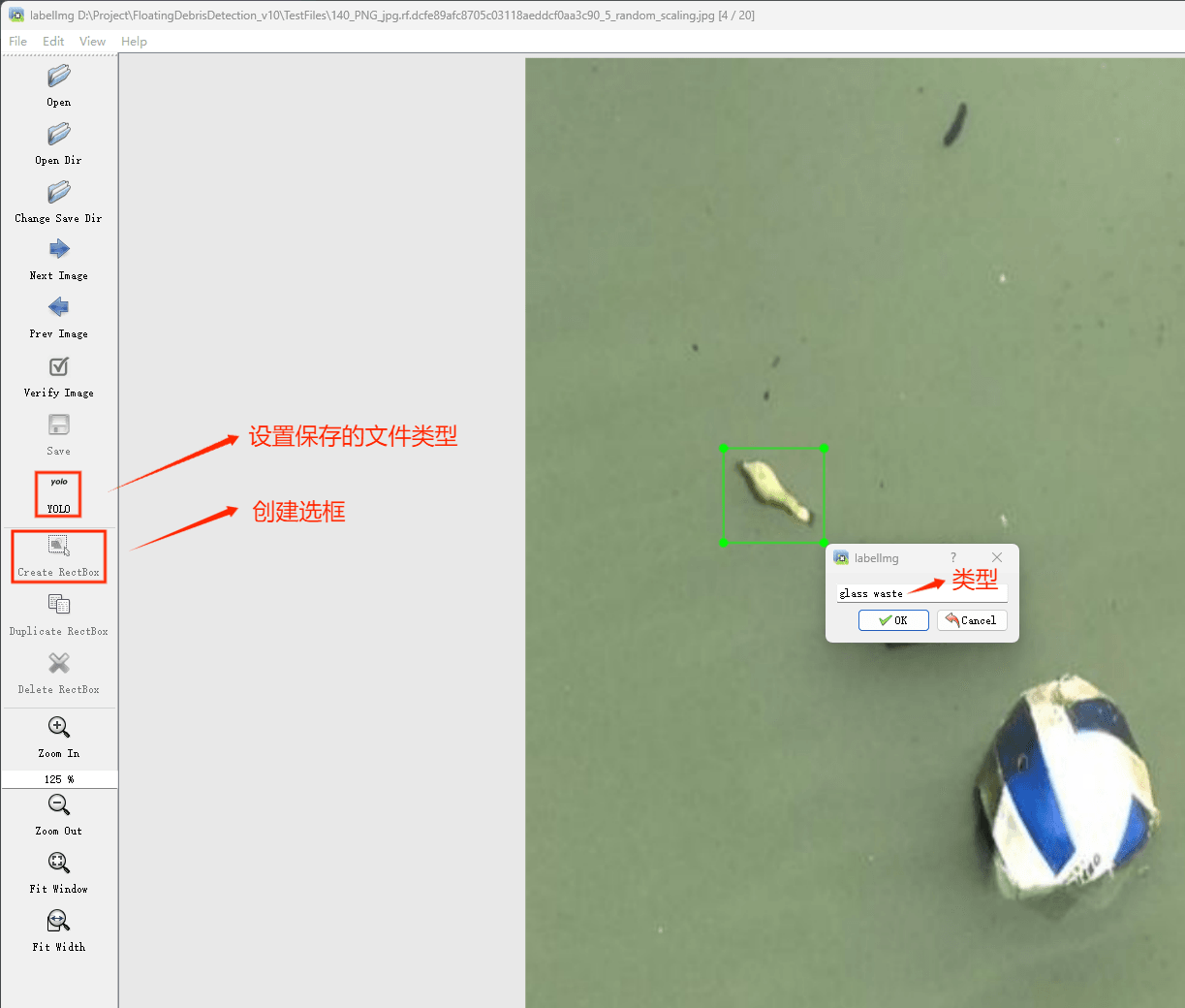
接下来就开始标注,画框,标记目标的label,然后d切换到下一张继续标注,不断重复重复。
Labelimg的快捷键

(3)数据准备
这里建议新建一个名为data的文件夹(这个是约定俗成,不这么做也行),里面创建一个名为images的文件夹存放我们需要打标签的图片文件;再创建一个名为labels存放标注的标签文件;最后创建一个名为 classes.txt 的txt文件来存放所要标注的类别名称。
data的目录结构如下:
│─img_data
│─images 存放需要打标签的图片文件
│─labels 存放标注的标签文件
└ classes.txt 定义自己要标注的所有类别(这个文件可有可无,但是在我们定义类别比较多的时候,最好有这个创建一个这样的txt文件来存放类别)
首先在images这个文件夹放置待标注的图片。
生成文件如下:
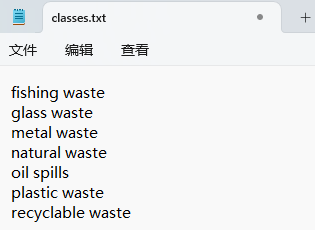
“classes.txt”定义了你的 YOLO 标签所引用的类名列表。
(4)YOLO模式创建标签的样式
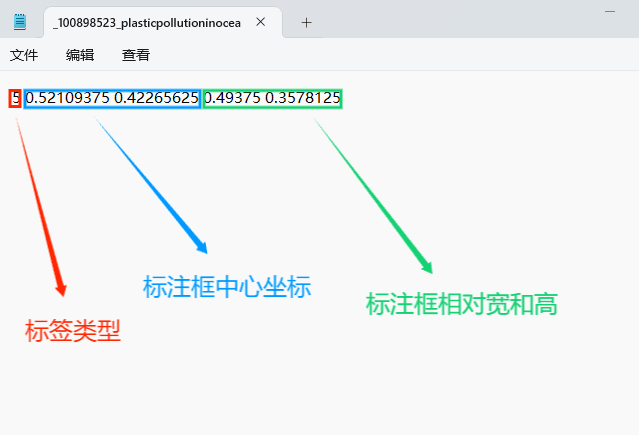
存放标签信息的文件的文件名为与图片名相同,内容由N行5列数据组成。
每一行代表标注的一个目标,通常包括五个数据,从左到右依次为:类别id、x_center、y_center、width、height。
其中:
–x类别id代表标注目标的类别;
–x_center和y_center代表标注框的相对中心坐标;
–xwidth和height代表标注框的相对宽和高。
注意:这里的中心点坐标、宽和高都是相对数据!!!
存放标签类别的文件的文件名为classes.txt (固定不变),用于存放创建的标签类别。
完成后可进行后续的yolo训练方面的操作。
模型训练
Tipps:模型的训练、评估与推理
1.YOLOv10的基本原理
YOLOv10是YOLO最新一代版本的实时端到端目标检测算法。该算法在YOLO系列的基础上进行了优化和改进,旨在提高性能和效率之间的平衡。首先,作者提出了连续双分配方法,以实现NMS-free训练,从而降低了推理延迟并提高了模型的性能。其次,作者采用了全面的效率-准确性驱动的设计策略,对YOLO的各种组件进行了综合优化,大大减少了计算开销,并增强了模型的能力。
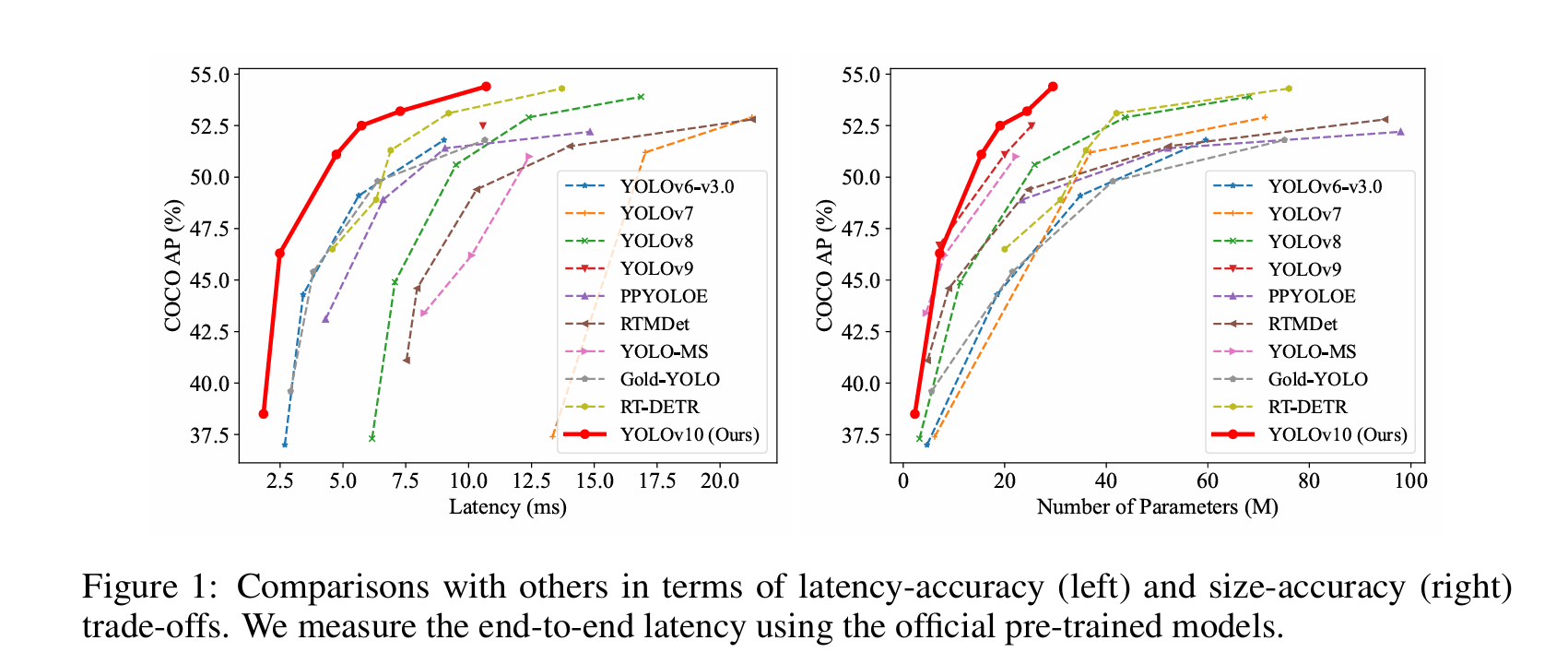
实验结果表明,YOLOv10在各种模型规模下都取得了最先进的性能和效率表现。例如,YOLOv10-S比RT-DETR-R18快1.8倍,同时拥有更小的参数数量和FLOPs;与YOLOv9-C相比,YOLOv10-B的延迟减少了46%,参数减少了25%,但保持了相同的性能水平。
YOLOv10创新点
(1)双标签分配
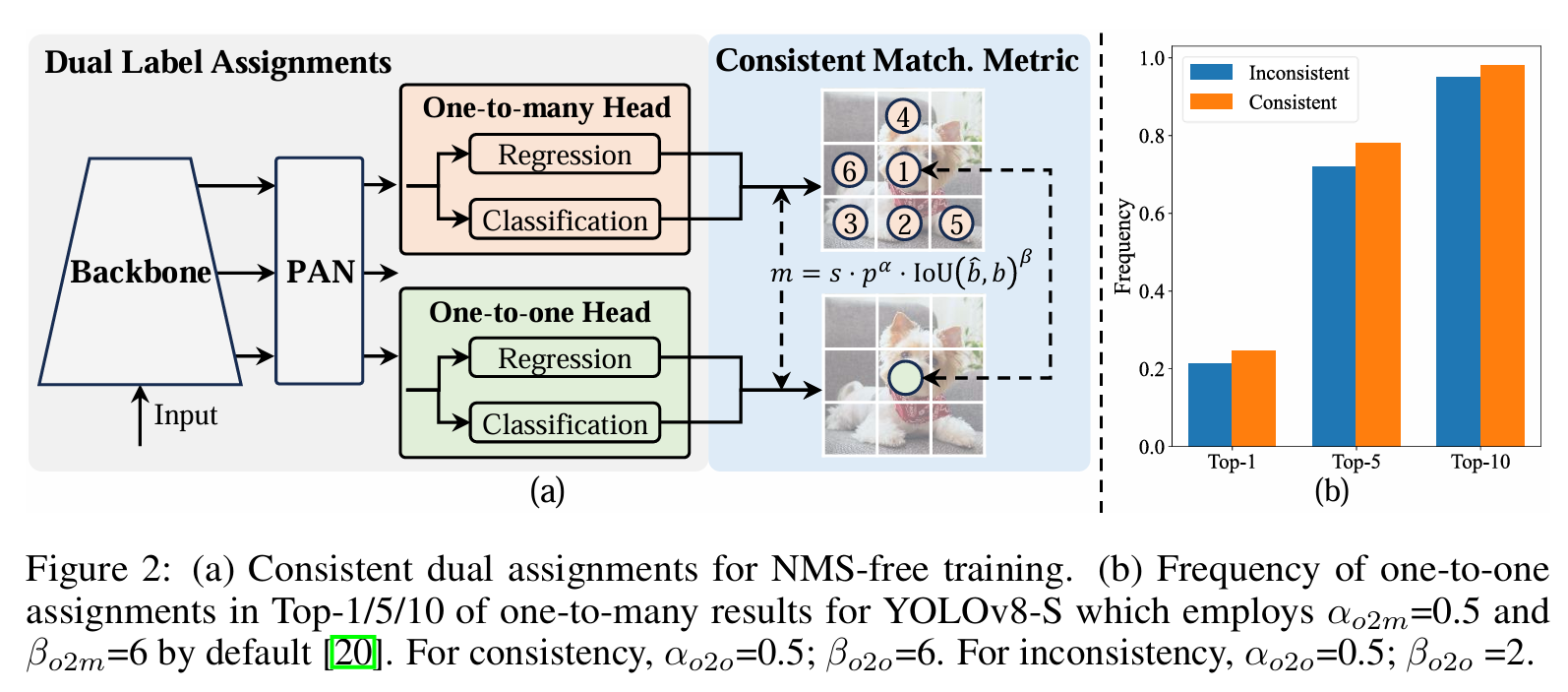
主干网络:使用增强版的CSPNet来提取图像特征,它能改善梯度流并减少计算量。
颈部:采用PAN结构汇聚不同尺度的特征,有效地实现多尺度特征融合。
一对多预测头:在训练过程中为每个对象生成多个预测,用来提供丰富的监督信号从而提高学习的准确性;在推理阶段不生效,从而减少计算量。
一对一预测头:在推理过程中为每个对象生成一个最佳预测,无需NMS操作,从而减少延迟并提高推理效率。
(2)模型设计改进
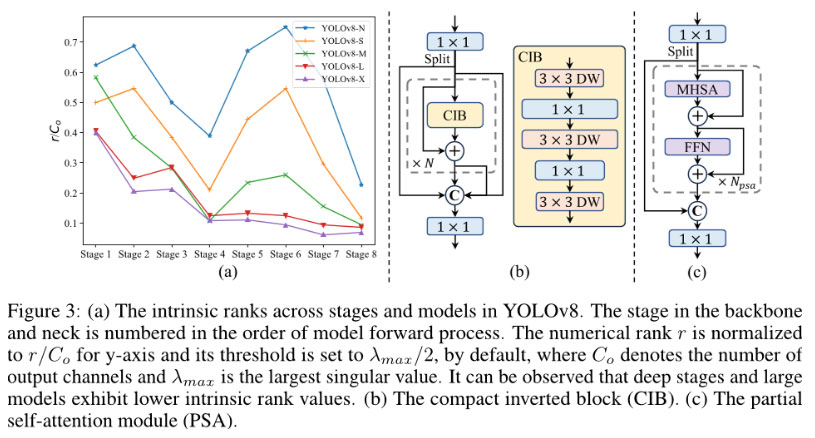
在模型设计方面,提出了以下几种改进点:
轻量级分类头: 通过对分类头进行轻量化设计,可以减少计算成本,而不会显著影响性能。
空间通道解耦降采样: 该方法通过分离空间和通道维度上的操作,提高了信息保留率,从而实现了更高的效率和竞争力。
排名引导块设计: 该方法根据各个阶段的冗余程度,采用不同的基本构建块,以实现更高效的模型设计。
大核深度卷积和部分自注意力模块: 这些模块可以在不增加太多计算开销的情况下提高模型的表现力。
2.数据集准备与训练
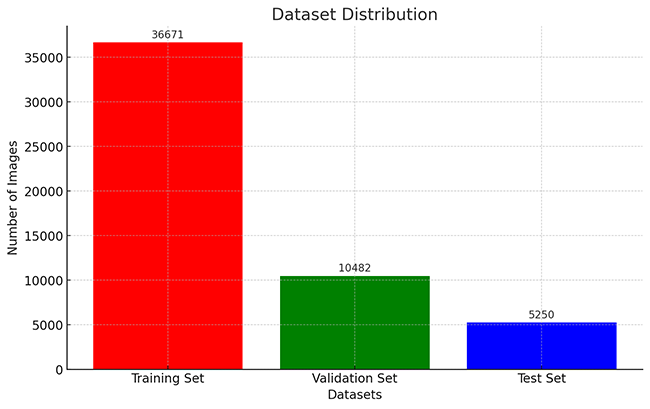
本研究使用了包含水面漂浮物的数据集,并通过 Labelimg 标注工具对每张图像中的目标边界框(Bounding Box)及其类别进行标注。基于此数据集,采用 YOLOv10n 模型进行训练。训练完成后,对模型在验证集上的表现进行了全面的性能评估与对比分析。整个模型训练与评估流程包括以下步骤:数据集准备、模型训练、模型评估。本次标注的目标类别主要集中于水面漂浮物。数据集总计包含 52403 张图像,具体分布如下:
训练集:36671 张图像,用于模型学习和优化。
验证集:10482 张图像,用于评估模型在未见过数据上的表现,防止过拟合。
测试集:5250 张图像,用于最终评估模型的泛化能力。
数据集分布直方图
以下柱状图展示了训练集、验证集和测试集的图像数量分布:
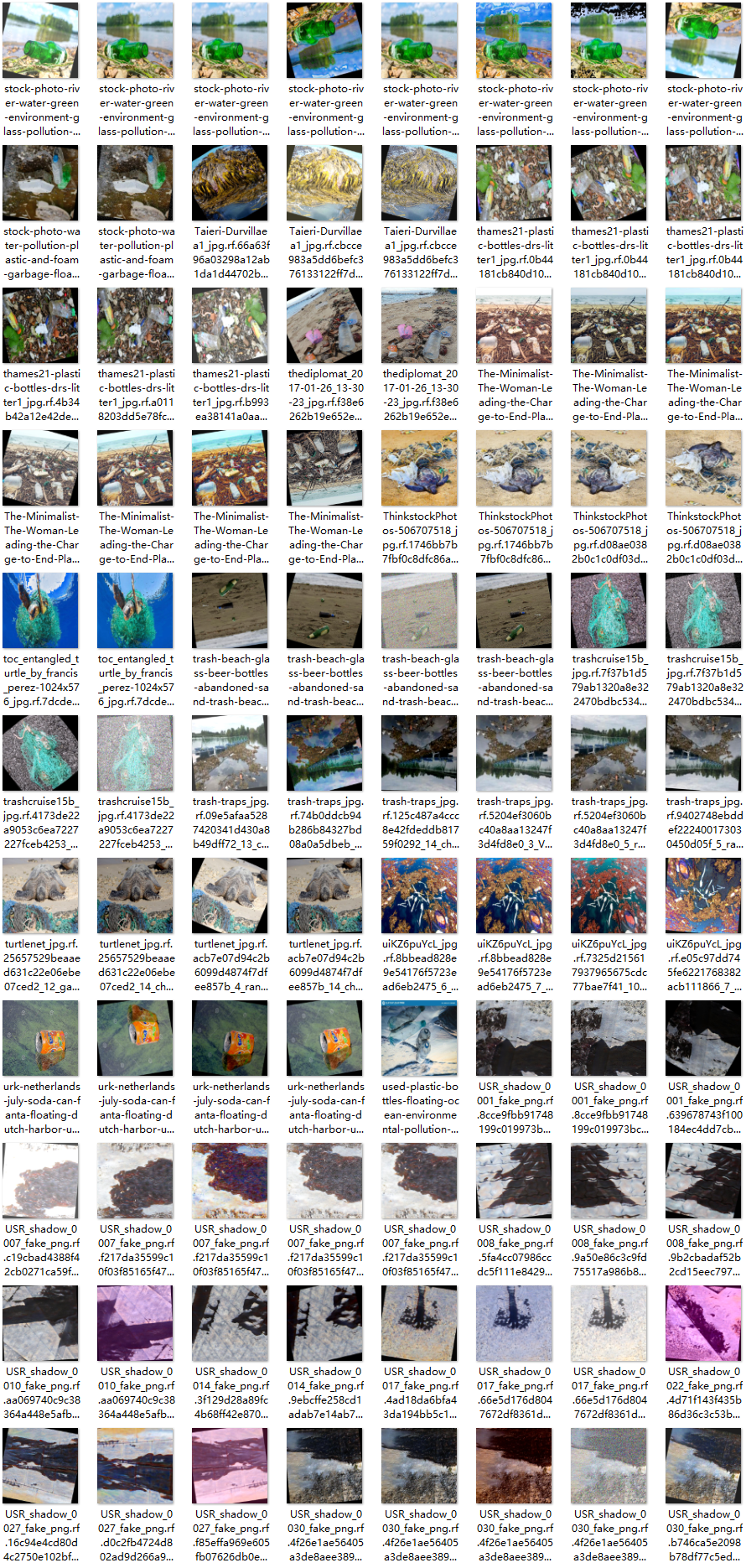
部分数据集图像如下图所示:
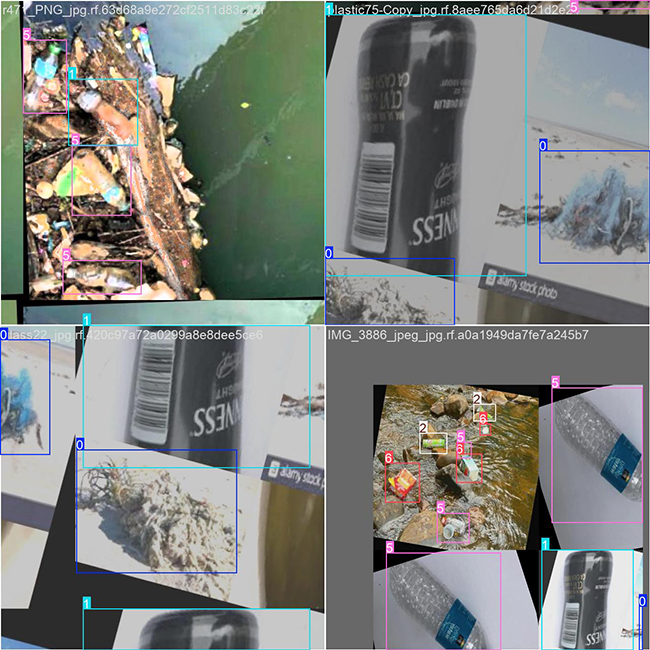
部分标注如下图所示:
这种数据分布方式保证了数据在模型训练、验证和测试阶段的均衡性,为 YOLOv10n 模型的开发与性能评估奠定了坚实基础。
图片数据的存放格式如下,在项目目录中新建datasets目录,同时将检测的图片分为训练集与验证集放入datasets目录下。
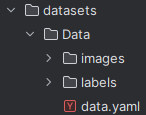
接着需要新建一个data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。YOLOv10在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。
data.yaml的具体内容如下:

这个文件定义了用于模型训练和验证的数据集路径,以及模型将要检测的目标类别。
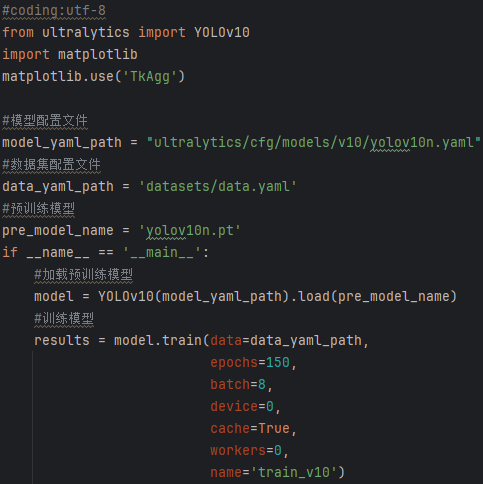
CPU/GPU训练代码如下:
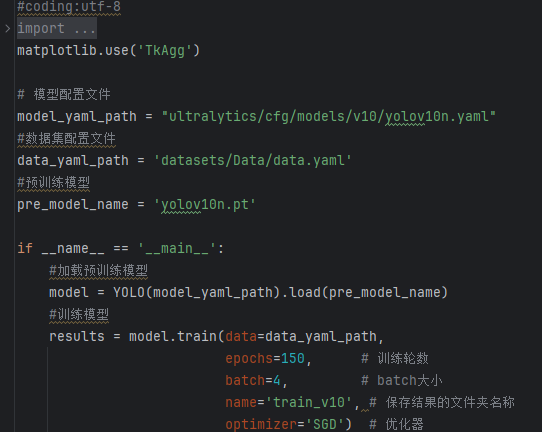
加载名为 yolov10n.pt 的预训练YOLOv10模型,yolov10n.pt是预先训练好的模型文件。
使用YOLO模型进行训练,主要参数说明如下:
(1)data=data_yaml_path: 指定了用于训练的数据集配置文件。
(2)epochs=150: 设定训练的轮数为150轮。
(3)batch=4: 指定了每个批次的样本数量为4。
(4)optimizer=’SGD’):SGD 优化器。
(7)name=’train_v10′: 指定了此次训练的命名标签,用于区分不同的训练实验。
3.YOLOv10模型训练结果与性能评估
在深度学习的过程中,我们通常通过观察损失函数下降的曲线来了解模型的训练情况。对于 YOLOv10 模型的训练,主要涉及三类损失:定位损失(box_loss)、分类损失(cls_loss)以及动态特征损失(dfl_loss)。这些损失的优化是提升目标检测性能的关键。
损失函数作用说明:
(1)定位损失 (box_loss):表示预测框与标定框之间的误差(GIoU),越小表示定位越准确。
(2)分类损失 (cls_loss):用于衡量锚框与对应的标定分类是否正确,越小表示分类越准确。
(3)动态特征损失 (dfl_loss):DFLLoss用于回归预测框与目标框之间的距离,并结合特征图尺度进行调整,最终提高目标检测的定位准确性。
训练和验证结果文件存储:
训练完成后,相关的训练过程和结果文件会保存在 runs/ 目录下,包括:
(1)损失曲线图(Loss Curves)
(2)性能指标曲线图(mAP、精确率、召回率)
(3)混淆矩阵(Confusion Matrix)
(4)Precision-Recall (P-R) 曲线
损失曲线(Loss Curve)和性能指标分析:
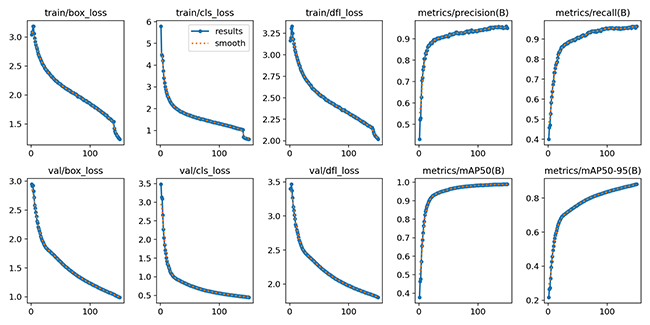
这张图展示了YOLOv10模型在训练和验证过程中的多个重要指标的变化趋势,具体如下:
train/box_loss:
含义:边界框损失,用于衡量模型预测边界框与真实边界框之间的误差。
趋势:损失值随着训练 epoch 增加逐渐降低,表明模型的边界框回归能力逐步提升。
train/cls_loss:
含义:分类损失,用于衡量模型分类结果与实际类别之间的误差。
趋势:分类损失逐步下降,说明模型在类别分类上的准确性逐渐提高。
train/dfl_loss:
含义:分布焦点损失(Distribution Focal Loss),主要用于回归任务的定位精度优化。
趋势:损失值稳定下降,表明模型的定位精度逐渐提高。
metrics/precision(B):
含义:训练过程中模型的精确率(Precision)。
趋势:精确率逐步上升并趋于稳定,说明模型减少了错误的正类预测。
metrics/recall(B):
含义:训练过程中模型的召回率(Recall)。
趋势:召回率逐渐上升,表明模型对目标的检测能力增强。
val/box_loss:
含义:验证集上的边界框损失。
趋势:损失值下降,表明模型在验证数据集上的边界框预测逐步改进。
val/cls_loss:
含义:验证集上的分类损失。
趋势:逐渐下降,说明模型在验证集上的分类效果不断提升。
val/dfl_loss:
含义:验证集上的分布焦点损失。
趋势:逐步下降,表明模型定位精度在验证集上也在提高。
metrics/mAP50(B):
含义:验证集上的平均精度(mAP@50,IoU=50%)。
趋势:随着训练进程,mAP@50 持续上升并趋于稳定,说明模型整体性能良好。
metrics/mAP50-95(B):
含义:验证集上的平均精度(mAP@50-95,IoU=50%-95%)。
趋势:mAP@50-95 持续上升并趋于稳定,显示模型在不同 IoU 门限下的检测性能都在提高。
总结:
(1)训练和验证损失:box_loss、cls_loss 和 dfl_loss 在训练和验证集上都逐步下降,表明模型收敛良好。
(2)精确率和召回率:precision 和 recall 持续提升,显示模型对目标检测的准确性和覆盖率越来越高。
(3)mAP:mAP50 和 mAP50-95 稳定提升,验证了模型的整体检测能力。
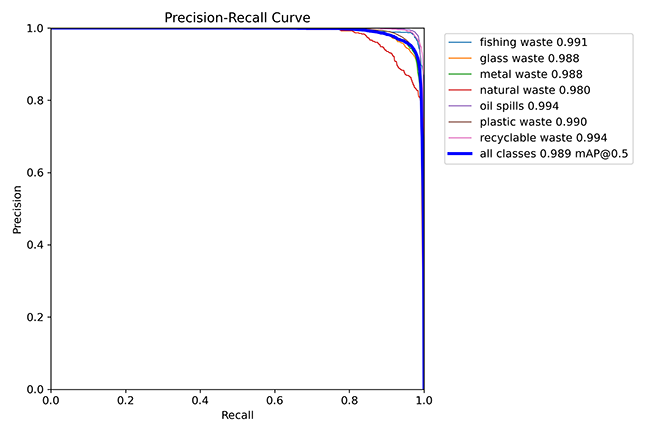
这张图展示的是 Precision-Recall 曲线,用于评估模型在不同类别下的检测性能。以下是详细解释:
曲线说明:
蓝色 (fishing waste):
表示类别 “fishing waste” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.991。
浅蓝色 (glass waste):
表示类别 “glass waste” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.988。
绿色 (metal waste):
表示类别 “metal waste” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.988。
橙色 (natural waste):
表示类别 “natural waste” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.980。
红色 (oil spills):
表示类别 “oil spills” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.994。
紫色 (plastic waste):
表示类别 “plastic waste” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.990。
深紫色 (recyclable waste):
表示类别 “recyclable waste” 的 Precision-Recall 曲线,其 mAP@0.5 为 0.994。
黑色 (all classes):
表示所有类别的平均 Precision-Recall 曲线,其平均 mAP@0.5 为 0.989。
总结:
图中每条曲线代表不同垃圾类别的精确率和召回率表现,oil spills 和 recyclable waste 表现最佳,而整体平均 mAP@0.5 达到 0.989,性能优异。
混淆矩阵 (Confusion Matrix) 分析
混淆矩阵是用于评估分类模型性能的重要工具,它显示了模型在每一类别上的预测结果与实际情况的对比。
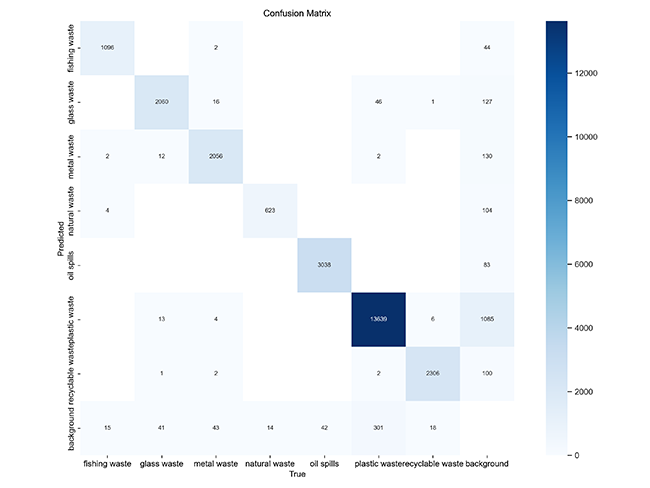
结论:
模型对大部分垃圾类别分类表现较好,但存在少量背景误分类和类别混淆,特别是 plastic waste 和 recyclable waste 的误分类需要优化。
4.检测结果识别
模型训练完成后,我们可以得到一个最佳的训练结果模型best.pt文件,在runs/train/weights目录下。我们可以使用该文件进行后续的推理检测。
imgTest.py 图片检测代码如下:
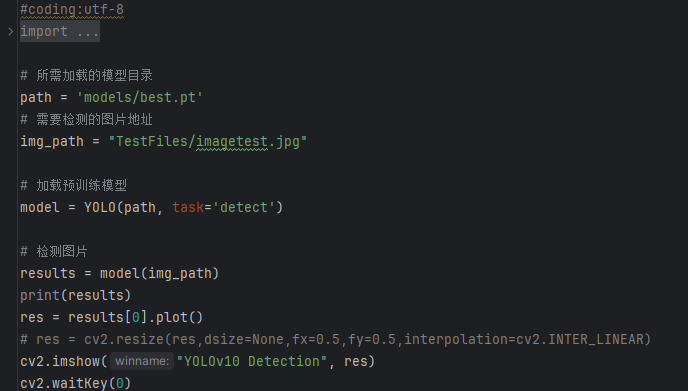
引入所需库:
(1)从 ultralytics 库中导入 YOLOv10 模型类。
(2)导入 OpenCV 库用于图像的显示。
指定模型和图像路径:
(1)path 是你要加载的预训练模型的路径,这里指向 models/best.pt,即保存了最佳训练权重的模型。
(2)img_path 是你需要检测的图片路径,这里指向一个特定的测试图片。
加载预训练模型:
(1)通过 YOLOv10(path, task=’detect’) 加载 YOLOv10 预训练模型,task=’detect’ 表示这是一个检测任务。
执行检测:
(1)使用 model(img_path) 对指定的图片进行检测。检测的结果保存在 results 中。
显示检测结果:
(1)使用 results[0].plot() 生成带有检测结果的图片。
(2)然后通过 OpenCV 的 cv2.imshow() 显示结果图片,并通过 cv2.waitKey(0) 保持窗口开启直到按键按下。
此代码的功能是加载一个预训练的YOLOv10模型,对指定的图片进行目标检测,并将检测结果显示出来。
执行imgTest.py代码后,会将执行的结果直接标注在图片上,结果如下:
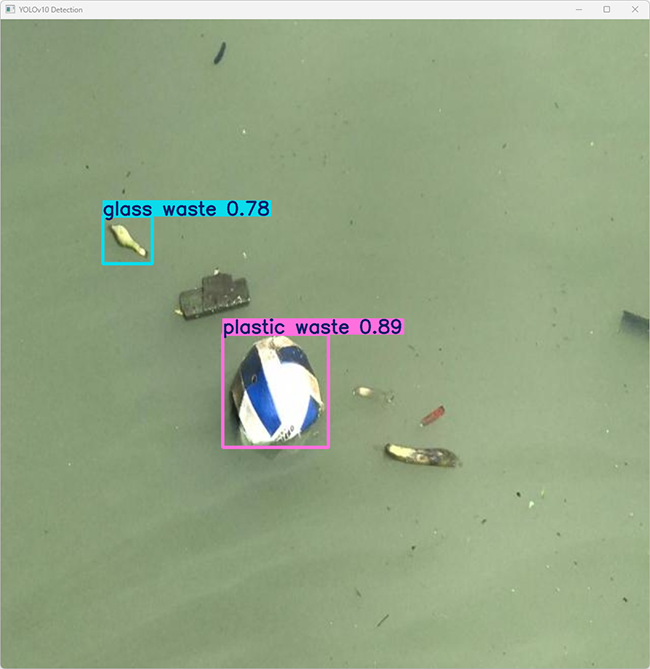
YOLOv10检测系统的推理结果日志。以下是对该结果的解析:
这段输出是基于YOLOv10模型对图片“imagetest.jpg”进行检测的结果,具体内容如下:
图像信息:
(1)处理的图像路径为:TestFiles/imagetest.jpg。
(2)图像尺寸为 640×640 像素。
检测结果:
(1)1 个玻璃垃圾 (glass waste)。
(2)1 个塑料垃圾 (plastic waste)。
处理速度:
(1)预处理时间: 5.5 毫秒
(2)推理时间: 9.0 毫秒
(3)后处理时间: 39.3毫秒
这段代码运行了一个基于 YOLOv10 模型的模型成功检测到测试图像中的玻璃垃圾和塑料垃圾。
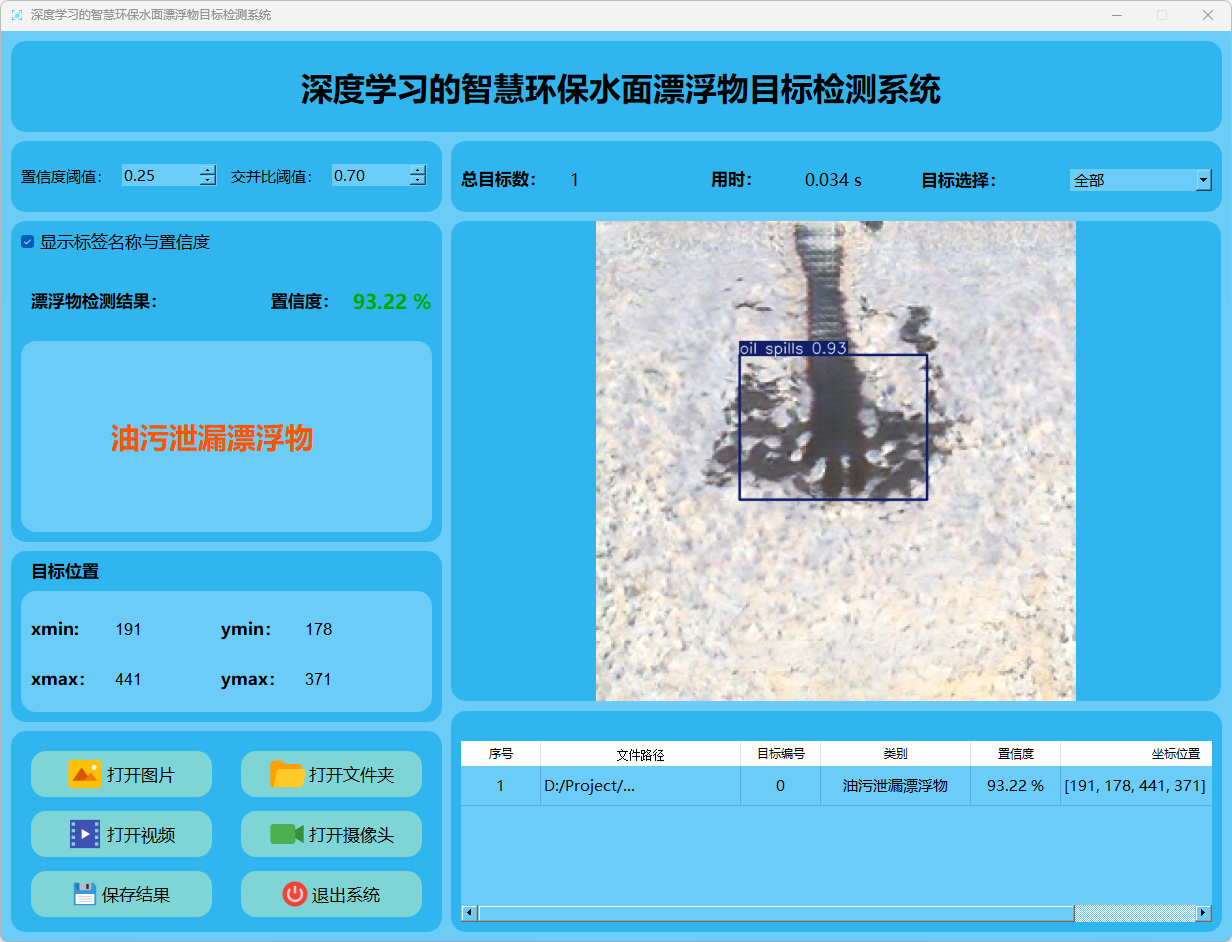
运行效果
– 运行 MainProgram.py

1.主要功能:
(1)可用于实际场景中的水面漂浮物;
(2)支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
(3)界面可实时显示目标位置、目标总数、置信度、用时等信息;
(4)支持图片或者视频的检测结果保存;
2.检测参数设置:

(1)置信度阈值:当前设置为0.25,表示检测系统只会考虑置信度高于25%的目标进行输出,置信度越高表示模型对检测结果的确信度越高。
(2)交并比阈值:当前设置为0.70,表示系统只会认为交并比(IoU)超过70%的检测框为有效结果。交并比是检测框与真实框重叠区域的比值,用于衡量两个框的相似程度,值越高表明重叠程度越高。
这两个参数通常用于目标检测系统中,调整后可以影响模型的检测精度和误检率。

用时(Time taken):
(1)这表示模型完成检测所用的时间为0.018秒。
(2)这显示了模型的实时性,检测速度非常快。
目标数目(Number of objects detected):
(1)检测到的目标数目为8,表示这是当前检测到的第1个目标。
目标选择(下拉菜单):全部:
(1)这里有一个下拉菜单,用户可以选择要查看的目标类型。
(2)在当前情况下,选择的是“全部”,意味着显示所有检测到的目标信息。
3.检测结果说明:
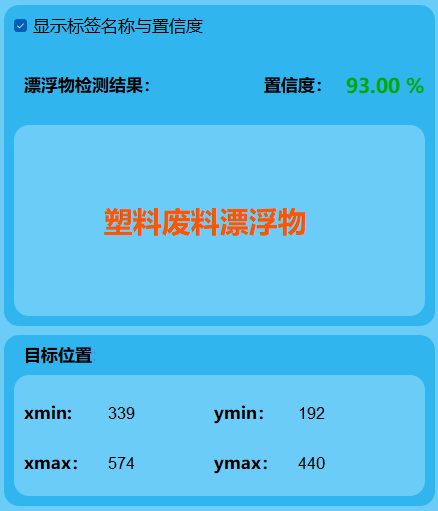
这张图表显示了基于YOLOv10模型的目标检测系统的检测结果界面。以下是各个字段的含义解释:
显示标签名称与置信度:
(1)表示是否显示目标的标签名称和置信度,当前已勾选。
目标选择:
(1)提供选择检测目标的选项,这里显示为全部,说明当前显示的是所有检测到的目标。
类型:
(1)表示检测到的目标类型,这里显示为塑料废料漂浮物。
置信度:
(1)表示模型对该目标的置信度,当前为93.00%,说明模型对这个检测结果有较高的信心。
目标位置: 给出了检测到的目标的边界框坐标:
(1)xmin:339 表示边界框左侧的x坐标为339。
(2)ymin:192 表示边界框顶部的y坐标为192。
(3)xmax:574 表示边界框右侧的x坐标为574。
(4)ymax:440 表示边界框底部的y坐标为440。
这张图显示了一个检测系统的具体结果,包括检测到的目标数量、检测时间、目标类型、置信度以及目标在图像中的位置坐标。这类界面通常用于显示模型在图像中定位和识别到的目标,并提供相关的位置信息和置信度评分。
4.图片检测说明
(1)玻璃废料漂浮物

(2)金属废料漂浮物

(3)可回收废料漂浮物

(4)塑料废料漂浮物

(5)油污泄露漂浮物
(6)渔业废料漂浮物

(7)自然废料漂浮物

点击打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹。
操作演示如下:
(1)点击目标下拉框后,可以选定指定目标的结果信息进行显示。
(2)点击保存按钮,会对检测结果进行保存,存储路径为:save_data目录下。
检测结果:系统识别出图片中的水面漂浮物,并显示检测结果,包括总目标数、用时、目标类型、置信度、以及目标的位置坐标信息。
5.视频检测说明

点击视频按钮,打开选择需要检测的视频,就会自动显示检测结果,再次点击可以关闭视频。
点击保存按钮,会对视频检测结果进行保存,存储路径为:save_data目录下。
检测结果:系统对视频进行实时分析,检测到水面漂浮物并显示检测结果。表格显示了视频中多个检测结果的置信度和位置信息。
这个界面展示了系统对视频帧中的多目标检测能力,能够准确识别水面漂浮物,并提供详细的检测结果和置信度评分。
6.摄像头检测说明

点击打开摄像头按钮,可以打开摄像头,可以实时进行检测,再次点击,可关闭摄像头。
检测结果:系统连接摄像头进行实时分析,检测到水面漂浮物并显示检测结果。实时显示摄像头画面,并将检测到的水面漂浮物位置标注在图像上,表格下方记录了每一帧中检测结果的详细信息。
7.保存图片与视频检测说明

点击保存按钮后,会将当前选择的图片(含批量图片)或者视频的检测结果进行保存。
检测的图片与视频结果会存储在save_data目录下。
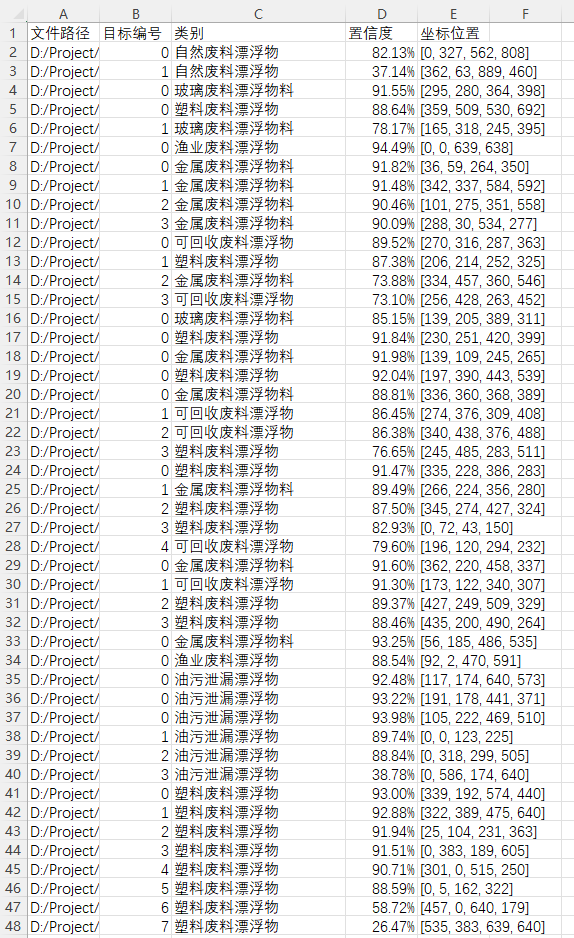
保存的检测结果文件如下:

图片文件保存的csv文件内容如下,包括图片路径、目标在图片中的编号、目标类别、置信度、目标坐标位置。
注:其中坐标位置是代表检测框的左上角与右下角两个点的x、y坐标。
(1)图片保存

(2)视频保存

– 运行 train.py
1.训练参数设置
(1)epochs 参数设置了训练的轮数。在此设置下,模型将对数据集进行150轮的训练。
(2)device=0 参数指定了在哪个设备上运行训练过程。0通常表示使用第一个GPU。
(3)这里指定训练在GPU上进行。
虽然在大多数深度学习任务中,GPU通常会提供更快的训练速度。
但在某些情况下,可能由于硬件限制或其他原因,用户需要在CPU上进行训练。
温馨提示:在CPU上训练深度学习模型通常会比在GPU上慢得多,尤其是像YOLOv10这样的计算密集型模型。除非特定需要,通常建议在GPU上进行训练以节省时间。
2.训练日志结果
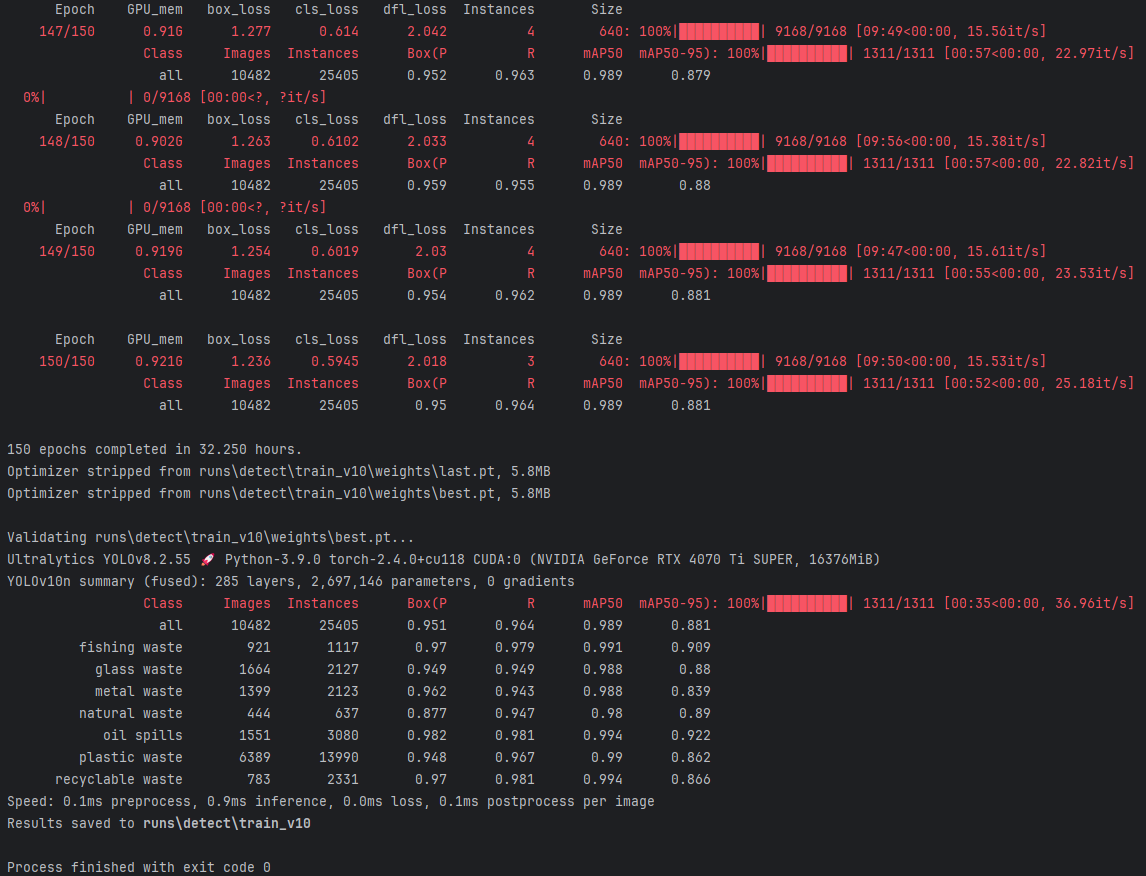
这张图展示了使用YOLOv10进行模型训练的详细过程和结果。
训练总时长:
(1)模型在训练了150轮后,总共耗时32.250小时。
(2)本次训练使用了 NVIDIA GeForce RTX 4070 Ti SUPER,显存16GB。
(3)表现出较高的训练效率,得益于YOLOv10模型的优化设计和高性能硬件的支持。
mAP50和mAP50-95:
(1)mAP50(IoU 50%):达到 98.9%。
(2)mAP50-95(IoU 50%-95%):达到 88.1%。
速度:
(1)0.1ms 预处理时间
(2)0.9ms 推理时间
(3)0.1ms 后处理时间
结果保存:
(1)Results saved to runs\detect\train_v10:验证结果保存在 runs\detect\train_v10 目录下。
完成信息:
(1)Process finished with exit code 0:表示整个验证过程顺利完成,没有报错。
总结:
(1)模型训练完成 150 个 epoch 后表现优异,mAP50 达到 98%,mAP50-95 接近 90%。
(2)不同类别的表现均衡,特别是在石油泄漏和渔网垃圾检测方面表现突出。
(3)该模型适合用于漂浮物分类和目标检测任务。
远程部署
Tipps:购买后可有偿协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
– 客服QQ:3666308803
项目文件
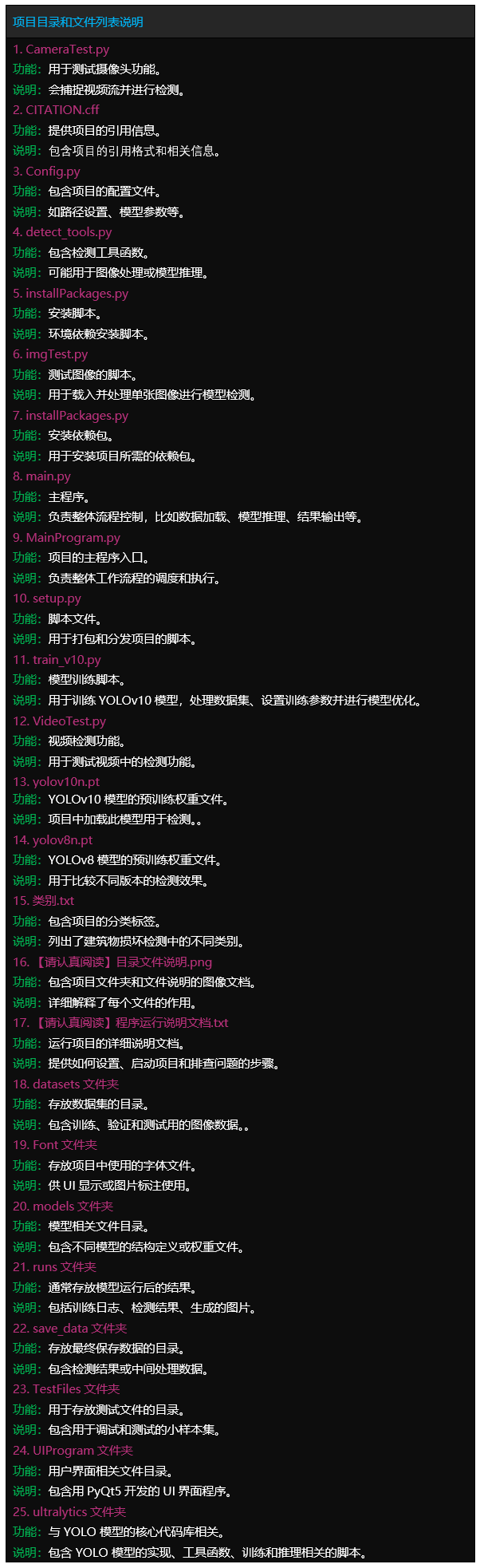
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)