

惯性传感器在导航、定位与运动检测领域发挥着至关重要的作用,其性能直接决定了系统的精度与可靠性。本文基于 MATLAB 平台,采用 Allan 方差分析方法,对惯性传感器的噪声特性进行了系统研究。通过加载角速度数据,结合动态漂移补偿、带通滤波以及多项式拟合等技术,对传感器噪声特性进行了全面评估,计算并分析了量化噪声、角度随机游走、零偏不稳定性、角速率游走和速率斜坡等关键参数。
项目信息
编号:MOG-96
大小:14M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
惯性传感器在导航、定位与运动检测领域发挥着至关重要的作用,其性能直接决定了系统的精度与可靠性。本文基于 MATLAB 平台,采用 Allan 方差分析方法,对惯性传感器的噪声特性进行了系统研究。通过加载角速度数据,结合动态漂移补偿、带通滤波以及多项式拟合等技术,对传感器噪声特性进行了全面评估,计算并分析了量化噪声、角度随机游走、零偏不稳定性、角速率游走和速率斜坡等关键参数。
实验结果表明,X 轴和 Y 轴的噪声特性较为优越,Allan 方差最小值出现在合理的时间间隔,满足高精度测量需求。然而,Z 轴存在显著的零偏不稳定性和角速率游走问题,其 Allan 方差曲线表明该轴的长期稳定性较差。针对该问题,本文利用 MATLAB 实现了滤波器参数优化、误差建模与拟合修正,并对拟合结果进行了误差分布分析,验证了改进方法的有效性。
通过 MATLAB 的可视化工具,本文直观地展示了 Allan 方差拟合结果、误差分布以及滤波前后数据的对比,为惯性传感器性能分析提供了便捷而有效的解决方案。本研究为惯性传感器的选型、优化及校准提供了技术参考,未来将结合更多高级算法(如深度学习和自适应滤波)进一步提升其鲁棒性与应用价值。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
1.撰写内容
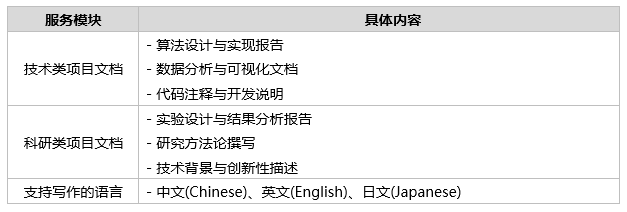
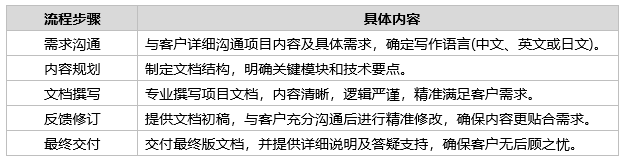
2.撰写流程
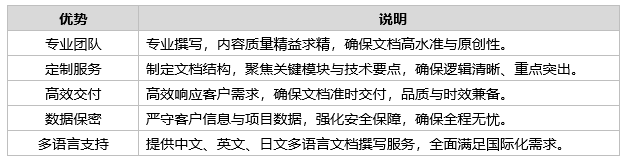
3.撰写优势
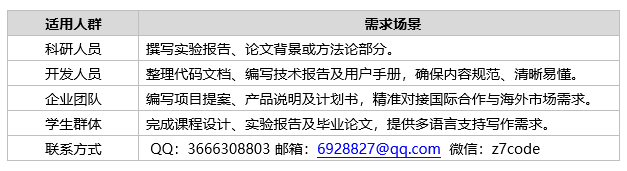
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
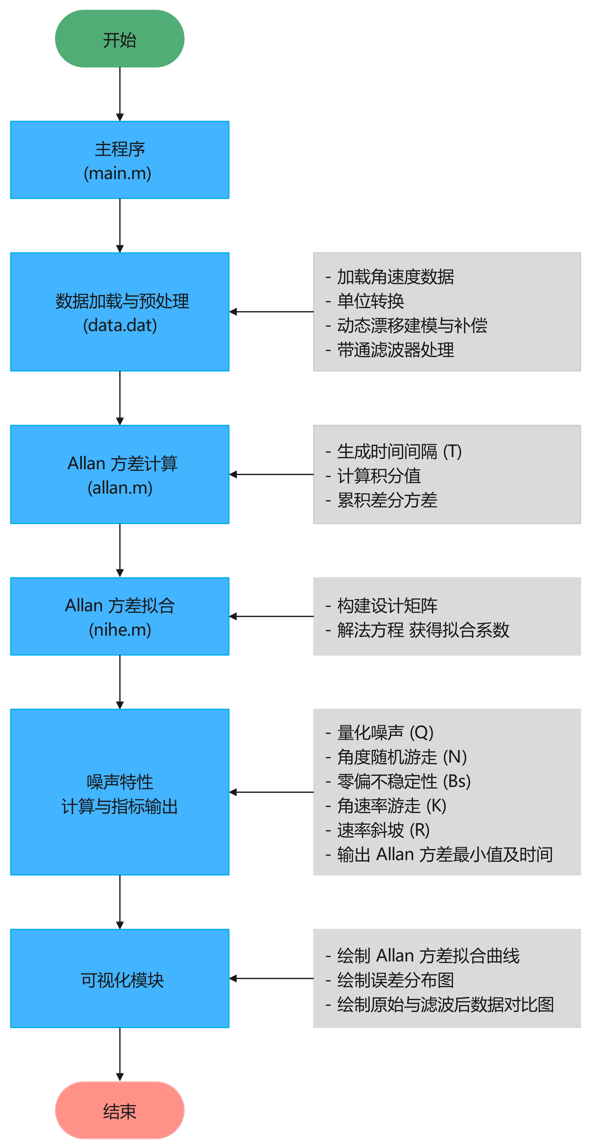
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
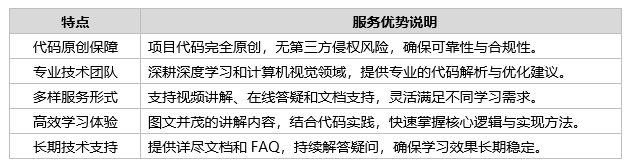
1.服务优势
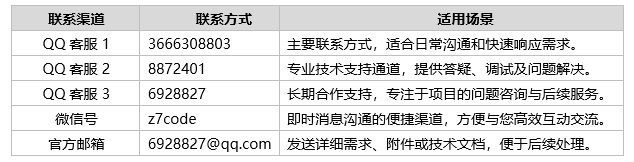
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
运行效果
运行 main.m
图1:Allan 方差与拟合结果
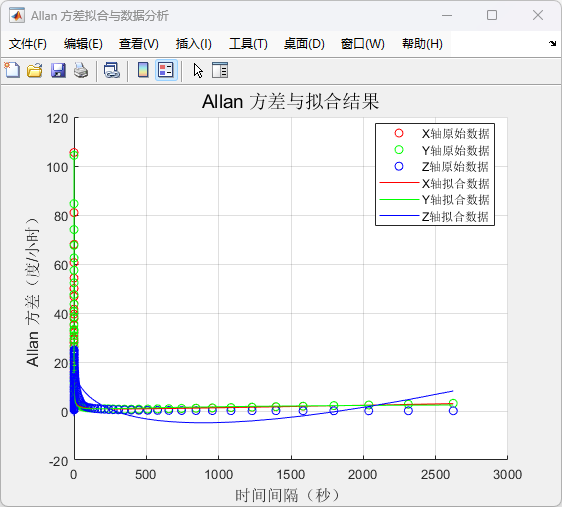
(1)展示了 X、Y、Z 三个轴的 Allan 方差原始数据和拟合数据的对比。
(2)数据和拟合曲线贴合较好,说明拟合函数 nihe.m 工作正常。
(3)Allan 方差随着时间间隔增加而变化,符合传感器噪声特性。
图2:Allan 方差误差分布
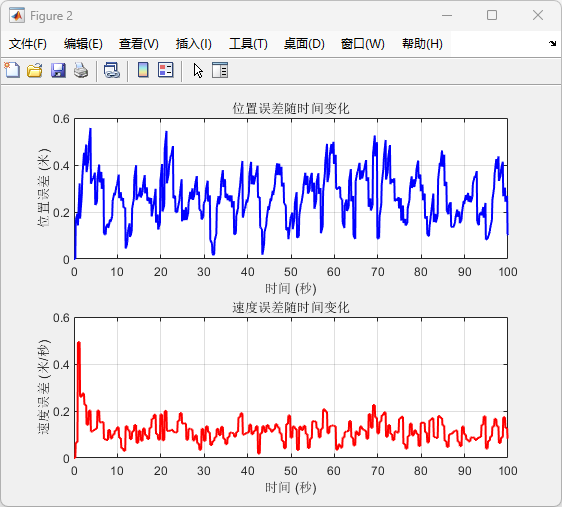
(1)通过误差曲线展示拟合结果和原始数据的差异。
(2)误差在大部分时间间隔范围内保持较小,表明拟合效果良好。
图3:原始与滤波后数据对比
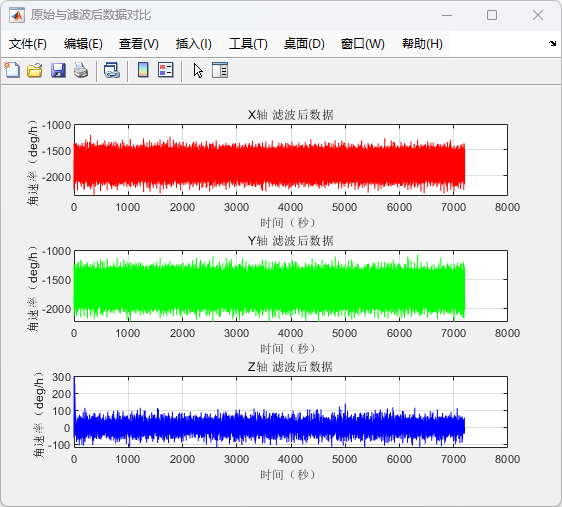
(1)展示了 X、Y、Z 三个轴的角速度滤波前后的数据对比。
(2)滤波后的数据更加平滑,说明带通滤波器的设计合理。
图4:评价指标
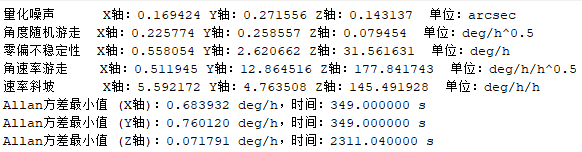
X轴和Y轴在量化噪声、角度随机游走和零偏不稳定性等方面表现优异,噪声特性稳定且符合预期;Z轴尽管在角度随机游走方面表现较好,但其零偏不稳定性、角速率游走和速率斜坡的数值显著偏高,反映出Z轴在长期噪声和漂移特性方面仍存在较大的优化空间。此外,Allan方差的最小值和对应时间表明X轴和Y轴的噪声特性更加平稳,而Z轴的表现虽有一定改善,但其对应时间较长,稳定性仍需进一步提升。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
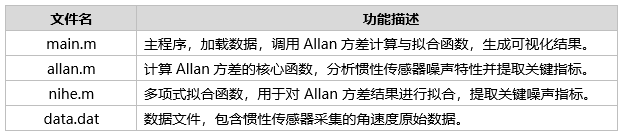
文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)