

在现代室内定位系统中,如何实现高精度、实时的定位一直是研究的重点和难点。由于室内环境通常具有复杂的空间结构和多重信号干扰,传统的定位方法如GPS在室内无法有效应用,因此对其他技术的探索成为研究热点。本文提出了一种融合Wi-Fi指纹定位与行人航位推算(PDR)的室内定位方法,以期在保证实时性的同时提升定位精度。
项目信息
编号:MOG-58
大小:2.7M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
在现代室内定位系统中,如何实现高精度、实时的定位一直是研究的重点和难点。由于室内环境通常具有复杂的空间结构和多重信号干扰,传统的定位方法如GPS在室内无法有效应用,因此对其他技术的探索成为研究热点。本文提出了一种融合Wi-Fi指纹定位与行人航位推算(PDR)的室内定位方法,以期在保证实时性的同时提升定位精度。
在该系统中,首先通过采集Wi-Fi信号强度(RSSI)构建了室内环境的无线电指纹地图。无线电指纹地图是一种基于位置的Wi-Fi信号分布模型,通过在室内空间不同位置采集Wi-Fi信号并记录其特征,可以为后续的定位提供参考。与此同时,系统使用加速度计和陀螺仪等惯性传感器数据进行行人航位推算(PDR),通过步长估计、方向推算等手段来计算用户的相对位置变化。PDR能够弥补Wi-Fi定位的间断性,为实现连续、平滑的定位轨迹提供支持。
为了进一步提高定位精度,本文采用了改进的加权K近邻(Improved WKNN)算法进行Wi-Fi定位。该算法在传统K近邻方法的基础上,引入了加权距离的思想,使得距离较近的参考点在定位中占据更大的权重,能够更好地反映用户的实际位置。此外,系统还结合了卡尔曼滤波和粒子滤波等数据融合技术,对Wi-Fi指纹定位结果与PDR结果进行优化融合。卡尔曼滤波能够有效降低传感器噪声的影响,而粒子滤波则能够处理非线性、多模态的状态估计问题,从而进一步提升系统的定位稳定性和精度。
本文通过在复杂的室内环境中进行实验,对提出的定位方法进行了验证。实验结果表明,该方法在不同环境下均能够有效减少定位误差,与单独使用Wi-Fi指纹定位或PDR方法相比,融合方法的精度和鲁棒性有了显著提高。尤其在信号干扰较大、障碍物较多的场景下,该系统能够保持较高的定位精度和连续性。这一研究为室内导航和位置服务提供了一个高效、可靠的解决方案,具有广泛的应用前景。
本研究的贡献在于通过多传感器融合和改进算法,成功提升了室内定位的精度和稳定性。未来的工作将继续优化算法的实时性,并探索该方法在更加多样化的室内环境中的适用性,为室内定位系统的进一步发展奠定基础。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
– 项目文档:写作流程
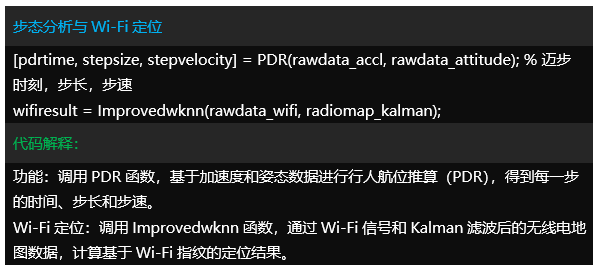
算法流程

代码讲解
Tipps:仅对main.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 main.m
图1:室内区域的平面图
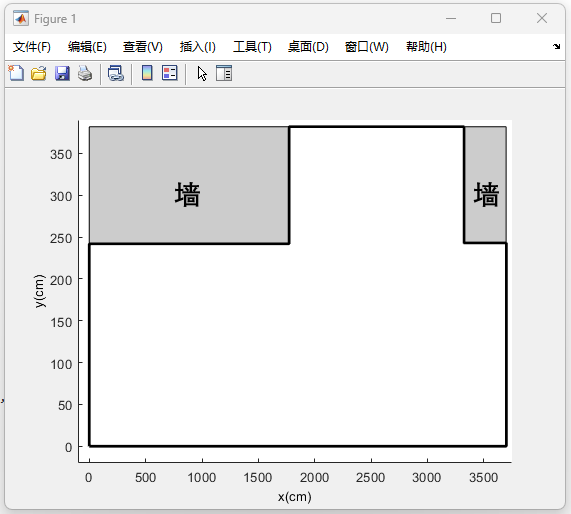
显示了一个室内区域的平面图,其中灰色区域标示为“墙”,表示障碍物或不可进入的区域。x轴和y轴以厘米为单位,分别表示水平方向和垂直方向的距离。这张图提供了测试或导航路径的基本布局。
图2:在第一张图的布局基础上,叠加了三种不同的路径,表示不同定位方法的比较:
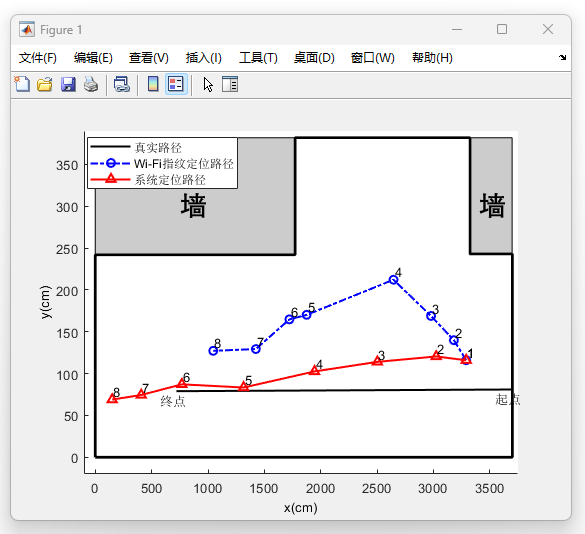
(1)真实路径(蓝色圆点和虚线):表示理想的或预期的实际路径。
(2)Wi-Fi信号定位路径(蓝色虚线和圆点):通过Wi-Fi信号定位计算出的路径,可能存在偏差。
(3)系统定位路径(红色三角形和实线):系统计算出的定位路径,展示了系统的导航效果。
每条路径上的数字标记表示路径上的节点或测量点,起点和终点也标记清楚。通过这些路径的对比,可以分析不同定位方式的精度和偏差。这在室内定位研究中用于评估定位算法的效果,例如Wi-Fi定位与系统定位的差异和优化效果。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)