

本研究提出了一种基于改进蚁群算法(ACA)的动态环境路径规划优化方法。
项目信息
编号:MOG-50
大小:80M
运行条件
Matlab开发环境版本:
– Matlab R2020b
项目介绍
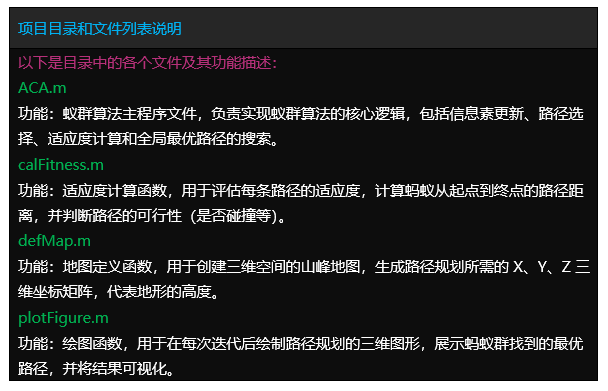
本文提出了一种基于改进蚁群算法(ACA)的动态环境路径规划优化方法。该算法融合了用于评估路径质量的适应度函数和用于模拟复杂环境的自定义地图定义(defMap)。主要改进包括自适应信息素更新策略和路径回溯机制,以提高收敛速度和路径效率。实验结果表明,所提出的ACA在解决方案质量和计算效率方面优于传统方法。该框架已在MATLAB中实现,并通过plotFigure.m生成了可视化图形。本研究为移动机器人和自主系统的路径规划算法的发展做出了贡献。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
– 项目文档:写作流程
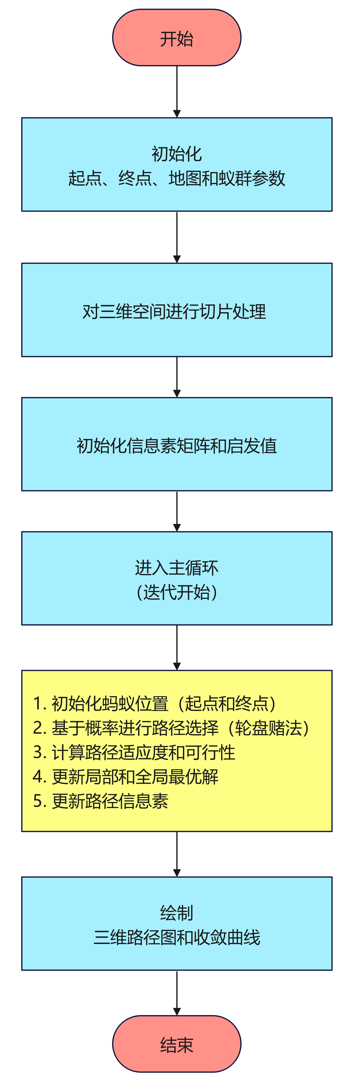
算法流程
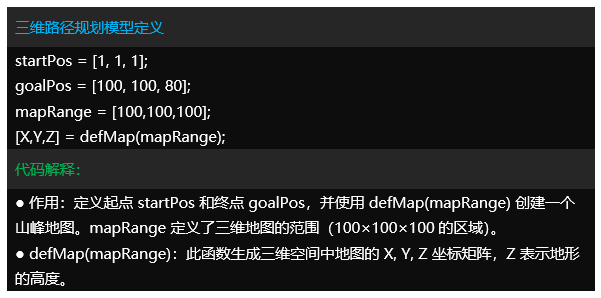
代码讲解
Tipps:仅对ACA.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 ACA.m
1.带路径的3D图
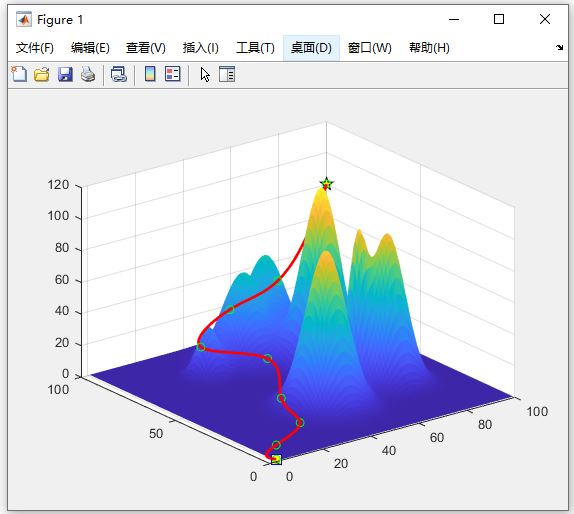
展示了蚁群优化算法(ACO)应用的三维地形或问题空间。红色的路径代表了蚂蚁在寻找最优路径时探索的结果。绿色的星形标记可能表示起点和终点,而路径上的点表示算法在搜索过程中访问的中间节点或路径点。
(1)背景中的地形图像象征着适应度函数或代价函数,算法试图通过搜索找到该函数的最小值。
(2)路径沿着地形显示,代表算法如何在不同的潜在解决方案之间进行搜索,最终找到一个较优解。
2.收敛曲线图
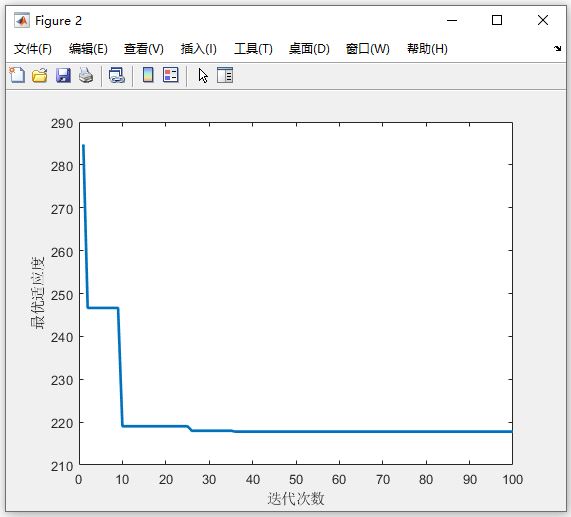
展示了蚁群算法在多次迭代中的收敛情况。横轴表示迭代次数或选择代数,纵轴表示适应度值(或代价、距离等)。曲线的下降表明算法从较高的适应度值开始,随着迭代的进行逐步优化,最终收敛到最优或接近最优的解。
(1)曲线在初期快速下降,说明算法在最开始阶段快速改进,然后在后续的迭代中逐渐收敛并微调解决方案。
两幅图共同展示了算法在解空间中的搜索轨迹以及其收敛特性。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)