

研究了基于Matlab的扫地机器人路径规划问题,并提出了一种全覆盖内螺旋算法。
项目信息
编号:MOG-36
大小:6.4M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
该算法通过将房间划分为栅格地图,利用内螺旋路径策略使机器人在房间内进行清扫。当机器人遇到障碍物或死区时,算法能够自动调整路径,使机器人有效避开障碍物并跳出死区,继续未清扫区域的清扫。实验结果表明,该算法能够实现高效的全覆盖清扫,适用于复杂室内环境的路径规划问题。
项目文档
Tipps:设计报告WORD格式,需要另外购买。
– 项目文档:设计报告
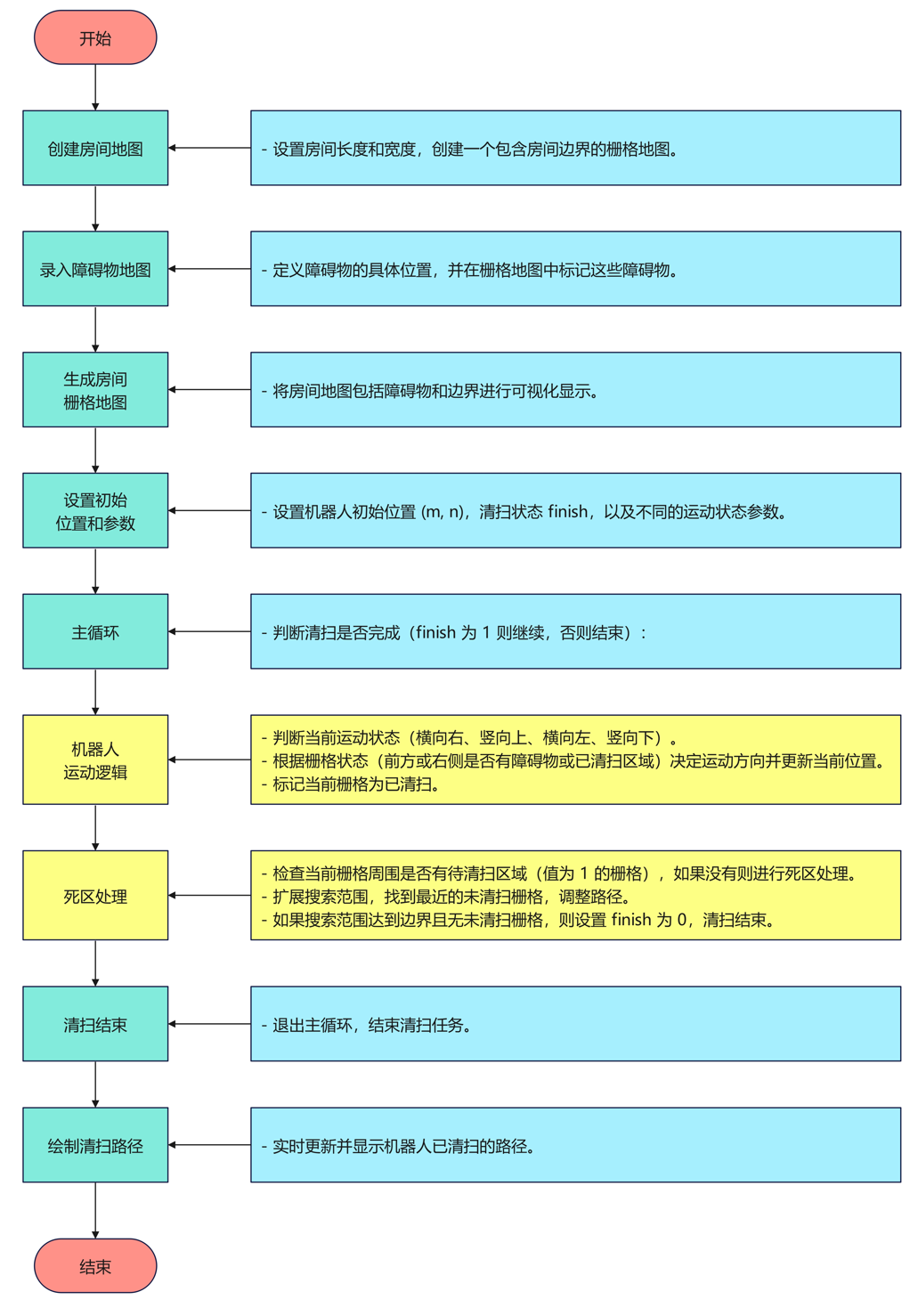
算法流程
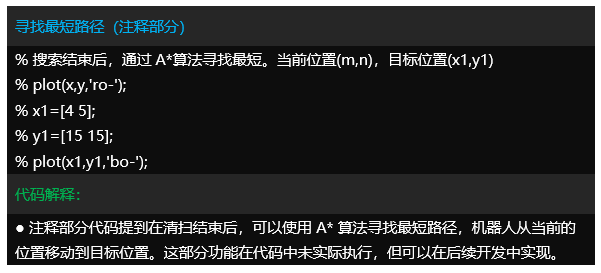
代码讲解
Tipps:仅对roommap.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 roommap.m
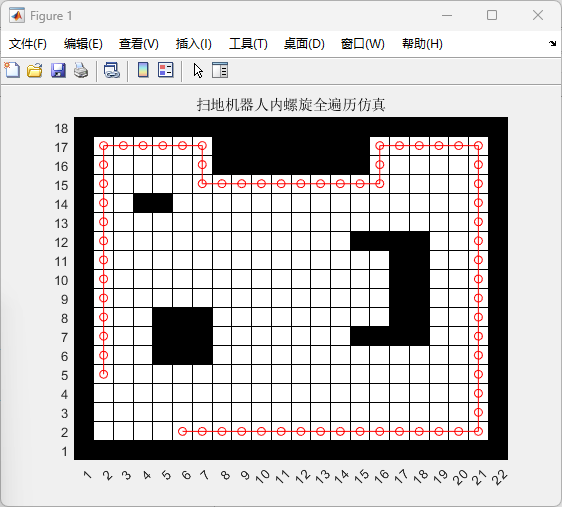
内容:图中展示了机器人在房间边缘开始清扫的路径。红色的圆圈和线条代表了机器人移动的路径,黑色的部分代表房间的边界或障碍物,白色部分为可以清扫的区域。
分析:该图展示了机器人在房间的边缘进行初始路径规划和清扫的过程,这是内螺旋算法的一部分,即沿着边界移动来覆盖整个房间的边缘。
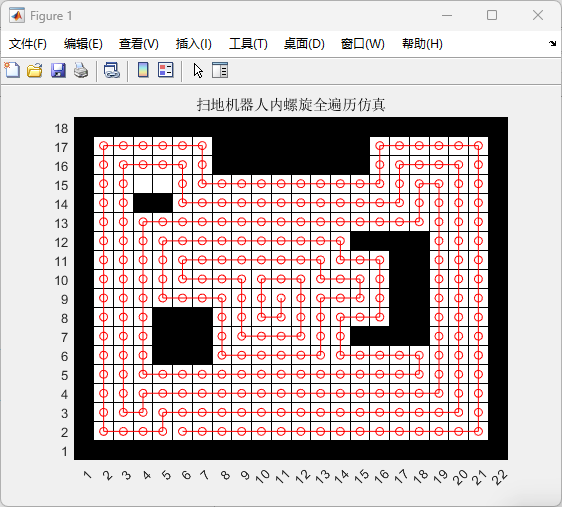
内容: 展示了机器人完成整个房间的清扫路径。红色的圆圈和线条表示机器人的移动轨迹,已经覆盖了房间内所有非障碍物的区域。
分析: 图中显示了机器人使用内螺旋算法的路径遍历了整个房间,最终实现了全覆盖清扫。这一结果展示了该算法的有效性和覆盖效率。
内容: 这张图显示的是一个MATLAB命令行的输出,显示了 x1 = 5, y1 = 15, finish = 0。
分析: 这些输出表示在图中的某一时刻,机器人已经完成了清扫任务,x1 和 y1 表示机器人在最后一个待清扫区域的坐标,finish = 0 表示清扫任务已完成,不再有未清扫的区域。
这些图展示了一个基于MATLAB实现的扫地机器人路径规划的仿真过程,使用内螺旋算法成功实现了房间的全覆盖清扫。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)