

覆盖路径规划是多智能体系统中一个至关重要的问题,特别是在复杂环境中的任务执行中。
项目信息
编号:POG-1
大小:4.7M
运行条件
Python开发环境:
– PyCharm的安装包:PyCharm: Python IDE for Professional Developers
– PyCharm的历史安装包:PyCharm: Python IDE for Professional Developers
– Anaconda的安装包:Anaconda | Start Coding Immediately
– Python开发版本:Python==3.8.5
需要安装依赖包:
– pip install numpy==1.24.4
– pip install tabulate==0.9.0
– pip install matplotlib==3.7.5
项目介绍
本文提出了一种基于多地图配置的覆盖路径规划算法,通过预设地图和随机生成的障碍地图来验证算法的有效性。该算法首先生成基础地图和随机障碍地图,并为每个地图添加随机起始点。随后,将地图转换为适合处理的格式,并应用覆盖路径规划算法来计算最优的覆盖路径。实验结果表明,该算法能够在不同的地图配置下生成高效的路径,确保多智能体能够全局覆盖目标区域,从而验证了其在不同环境下的适应性和实用性。
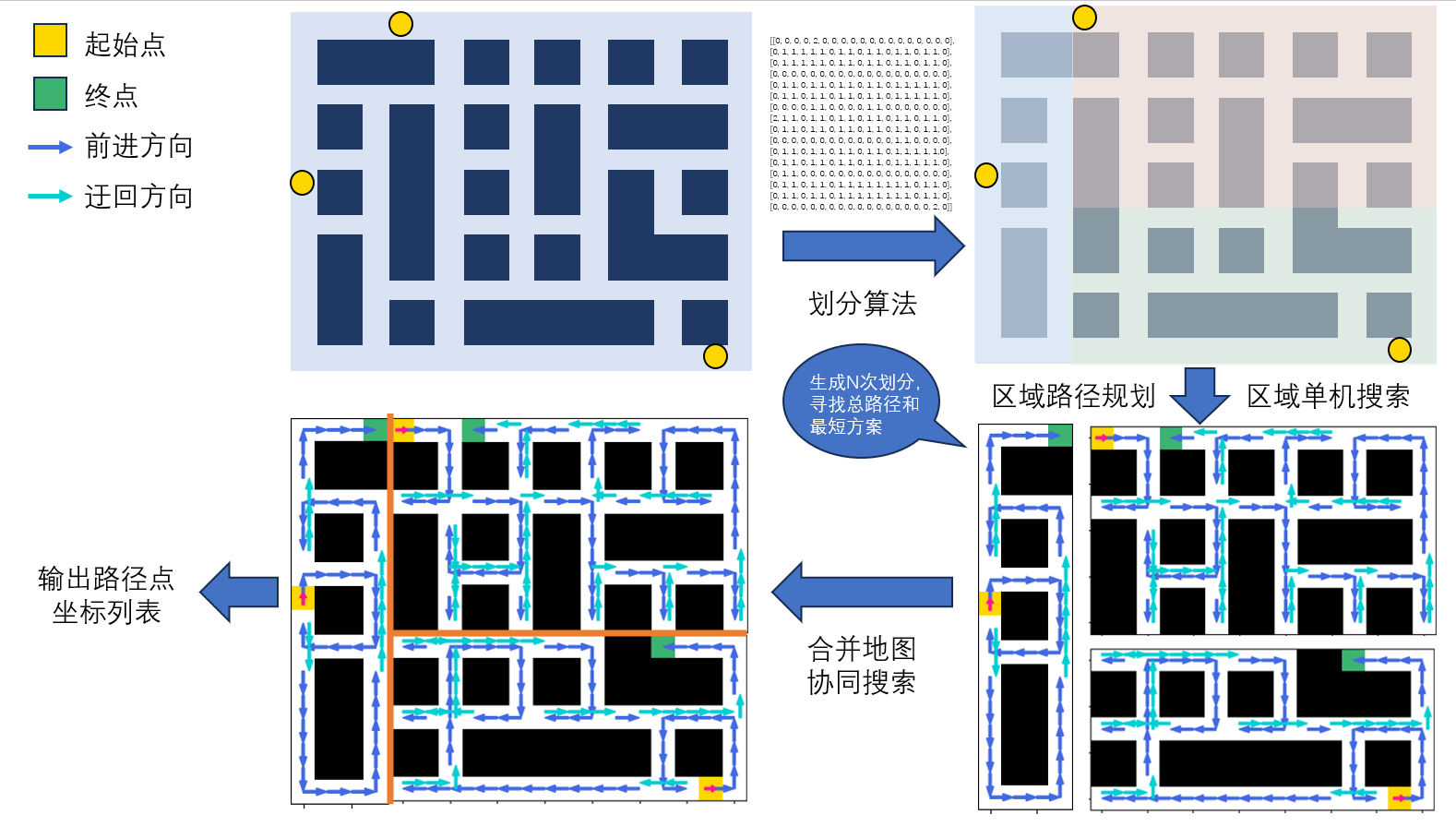
将多机问题转化为单机问题,每个个体(无人机/UAV)覆盖式扫描每个划分好的地图,最后合并每个地图下的路径规划,完成多机协同覆盖搜索。
每个划分地图都包含一个个体在内,因此有多种划分方式,这里的区域划分算法效果可能有初阶、中阶和高阶之分。理想情况下,覆盖所有的地图划分需要尽可能地均匀分配地图,以确保总时长最少。更高阶的区域划分需要考虑到空间的连通性和每个区间的步数,划分出更加合理的区间。
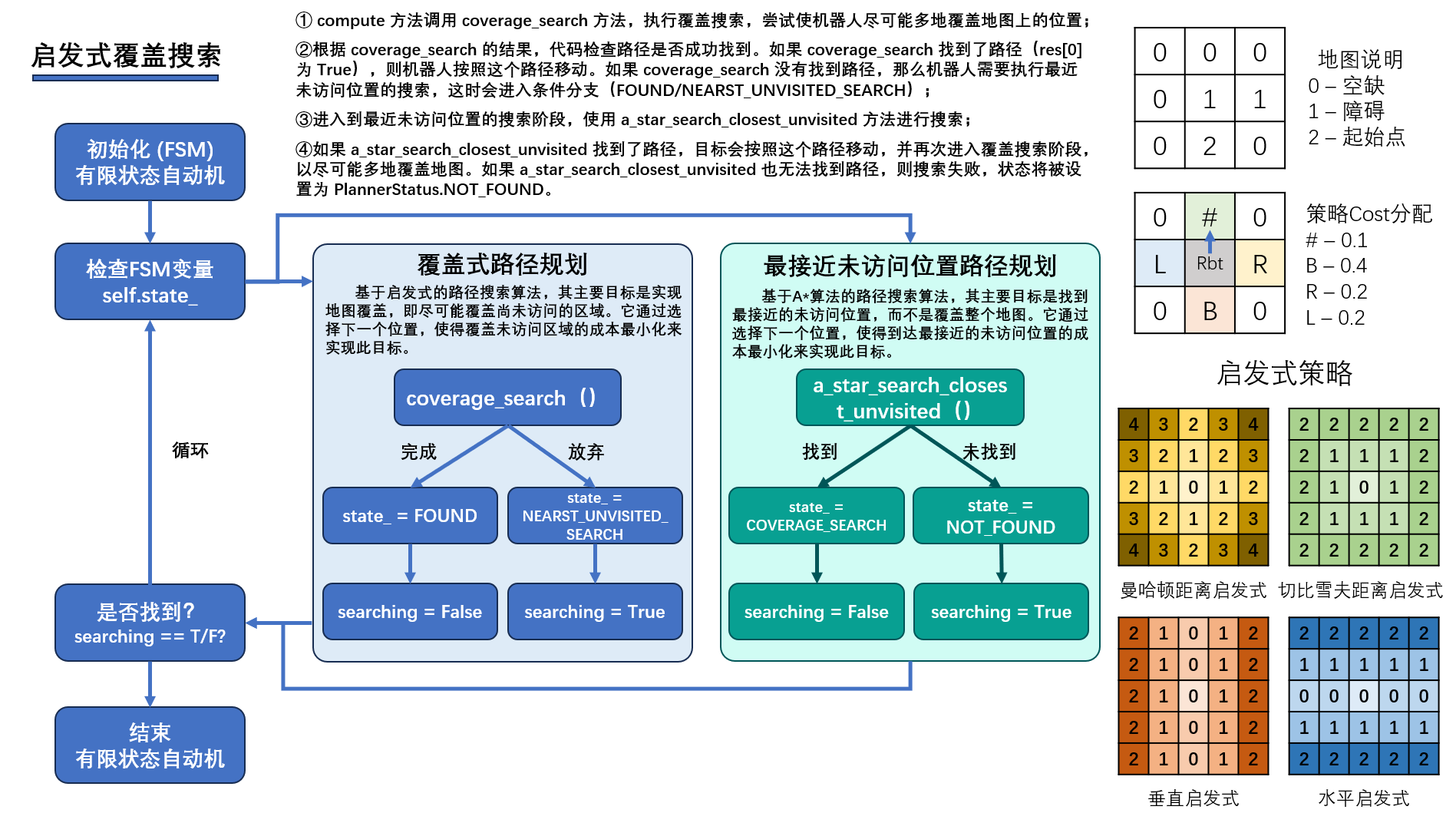
单机路径规划算法(启发式)Single-Agent Path Planning Algorithm (Heuristic):
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
– 项目文档:写作流程
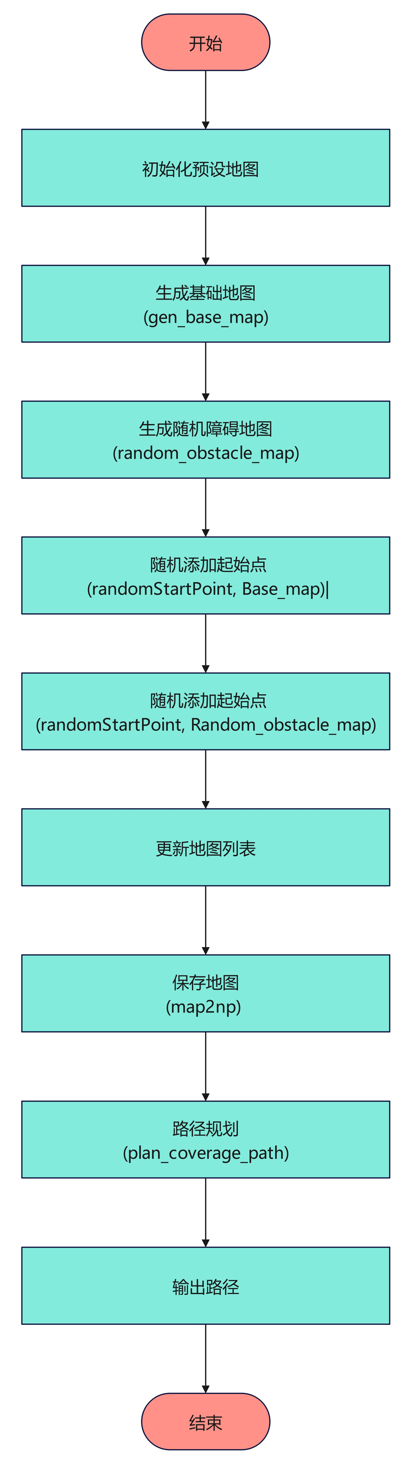
算法流程
代码讲解
Tipps:仅对main.py部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
– 运行main.py
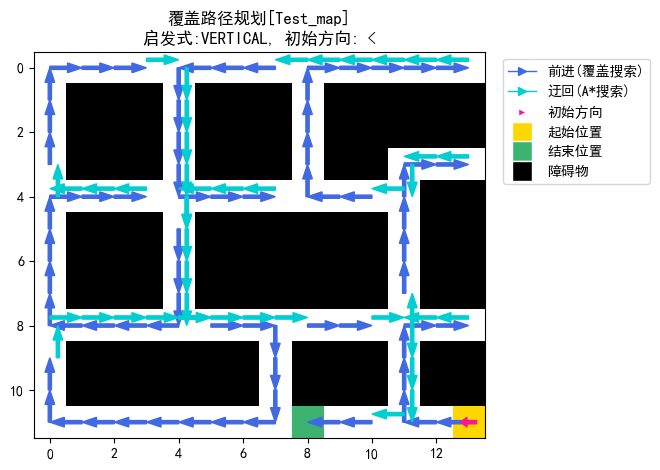
Test_map:智能体在测试地图上使用VERTICAL启发式进行路径规划。
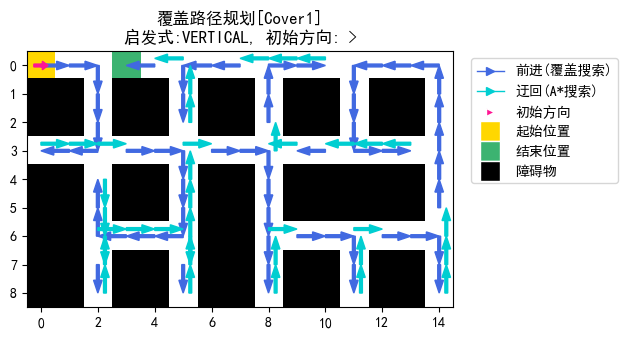
Cover1:智能体在Cover1地图上使用VERTICAL启发式进行路径规划。
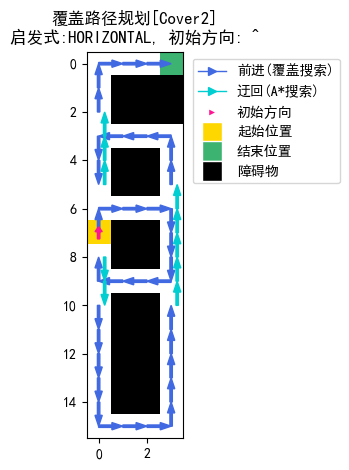
Cover2:智能体在Cover2地图上使用HORIZONTAL启发式进行路径规划。
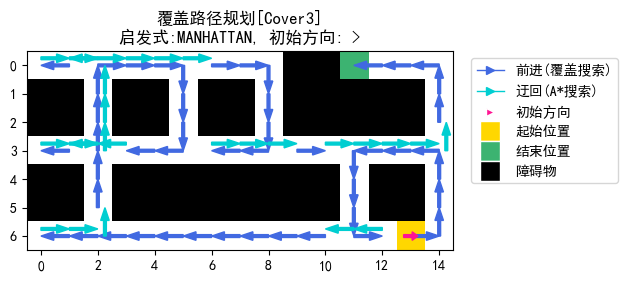
Cover3:智能体在Cover3地图上使用MANHATTAN启发式进行路径规划。
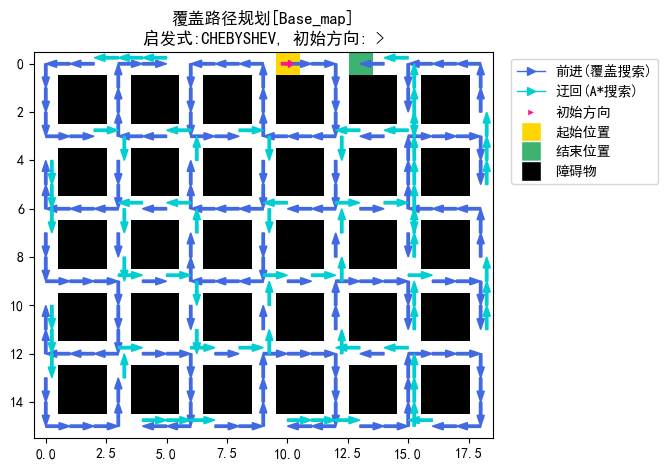
Base_map:智能体使用CHEBYSHEV启发式在基础地图上执行覆盖路径规划。
Random_obstacle_map:智能体在随机生成的障碍地图上使用MANHATTAN启发式进行路径规划。
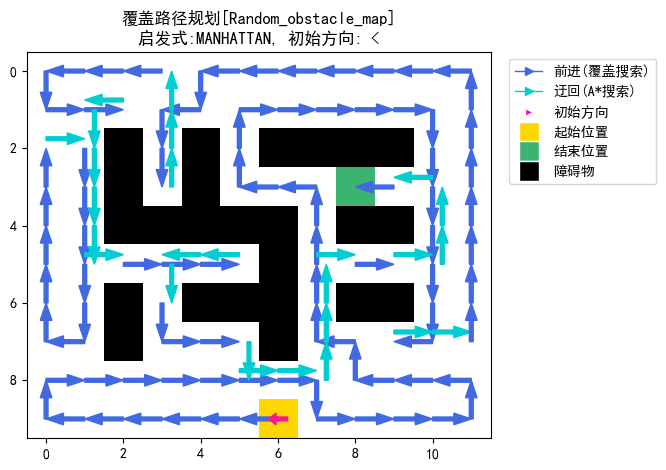
这些图表表示了多智能体覆盖路径规划算法在不同地图配置上的执行结果。图中的内容包括:
1.箭头方向:表示智能体在路径上的行进方向。蓝色箭头表示覆盖搜索路径,青色箭头表示路径的过渡(通常通过A*搜索算法)。
2.起始和结束位置:
(1)黄色方块标记智能体的起始位置。
(2)绿色方块标记智能体的结束位置。
3.障碍物:黑色方块表示地图中的障碍物区域,智能体不能穿越这些区域。
4.地图和路径规划的名称:每个图表顶部注明了地图的名称以及路径规划的启发式(例如 CHEBYSHEV, VERTICAL, HORIZONTAL, MANHATTAN)和智能体的初始方向(例如左、右、上、下箭头)。
远程部署
Tipps:购买后可有偿协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
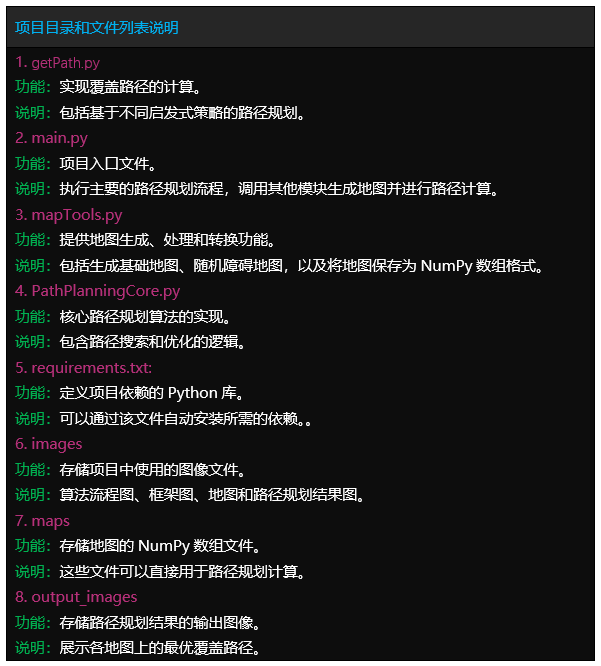
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)