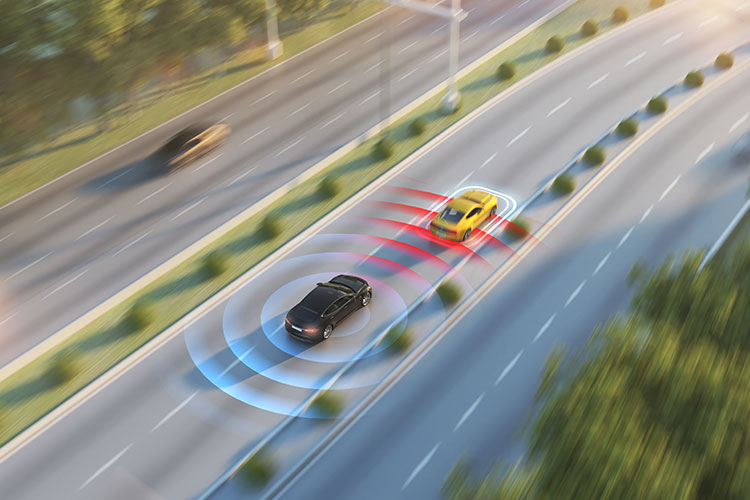

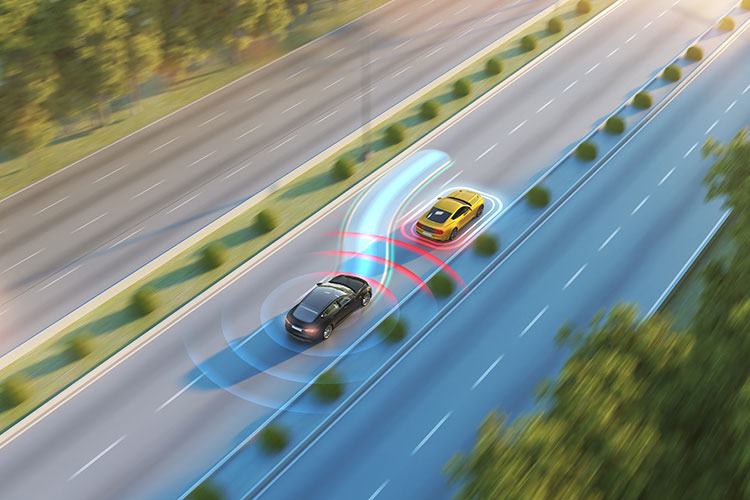
在本研究中,我们开发并实现了一种基于V2X(车联网)技术的多车仿真系统,用于预测车辆速度和位置,并触发前向碰撞预警(FCW)和盲点警告(BSW)。
项目信息
编号:MOG-1
大小:15M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2022b、2023b
项目介绍
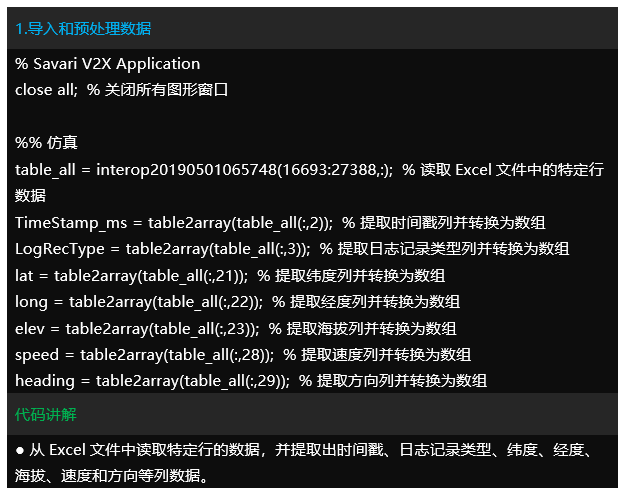
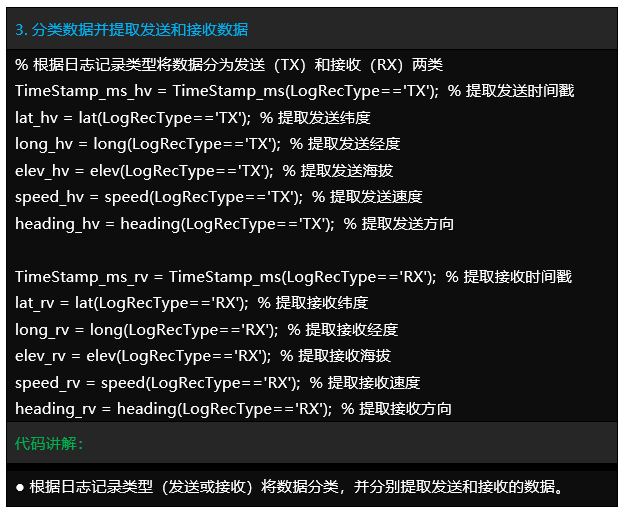
该系统使用了一组实际驾驶数据,并对不同类型的记录进行了分类处理,包括车辆发送(TX)和接收(RX)的消息。通过提取车辆的地理位置、速度、方向等关键参数,我们计算了每辆车在不同时间间隔内的速度变化。
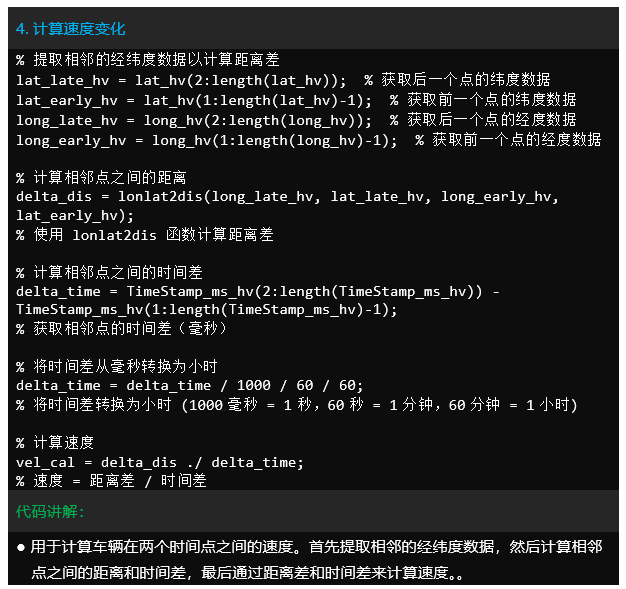
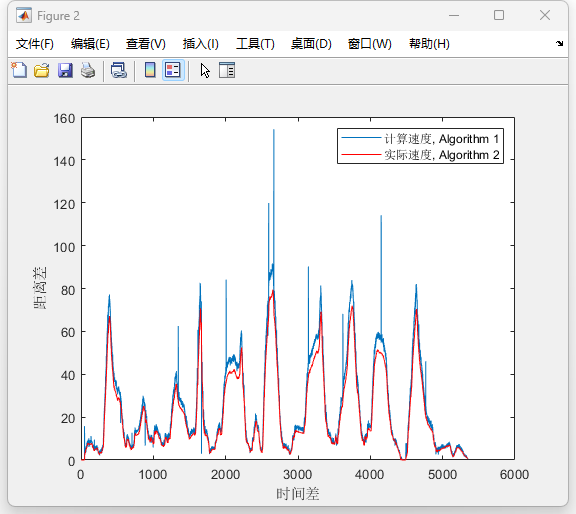
在仿真过程中,我们使用了基于经纬度计算距离的算法(lonlat2dis),并结合时间间隔计算出了车辆的实际速度(vel_cal)。为了验证该算法的有效性,我们将计算速度与实际记录速度进行了对比分析。
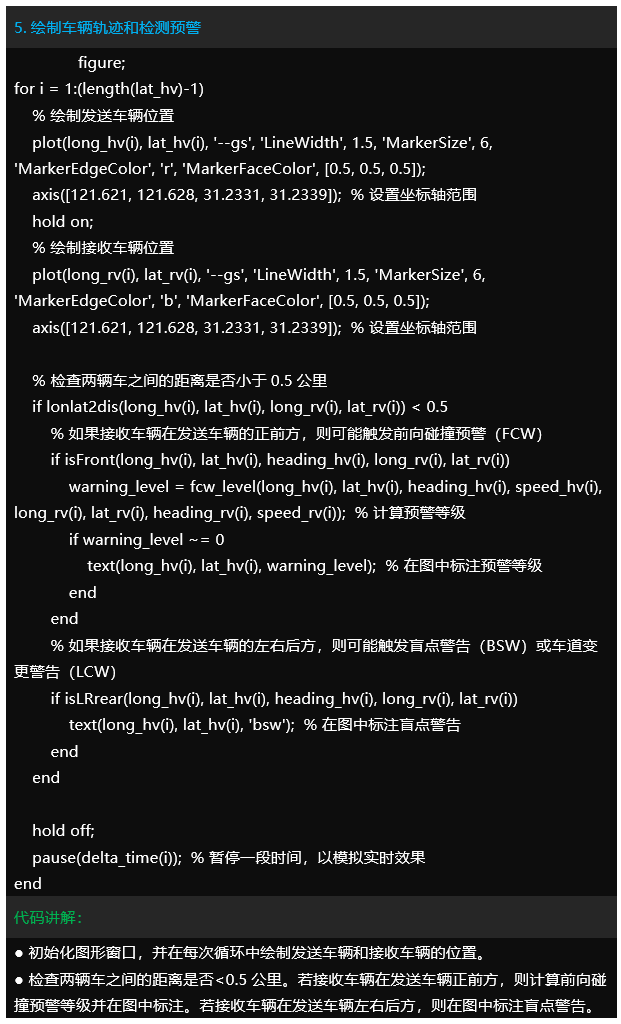
此外,我们还设计了一套预警机制,通过判断相对位置和方向,识别前方或侧后方的车辆,并触发相应的预警信息。仿真结果表明,该系统能够有效地识别潜在的碰撞风险,并及时发出预警,从而提高驾驶安全性。
项目结构
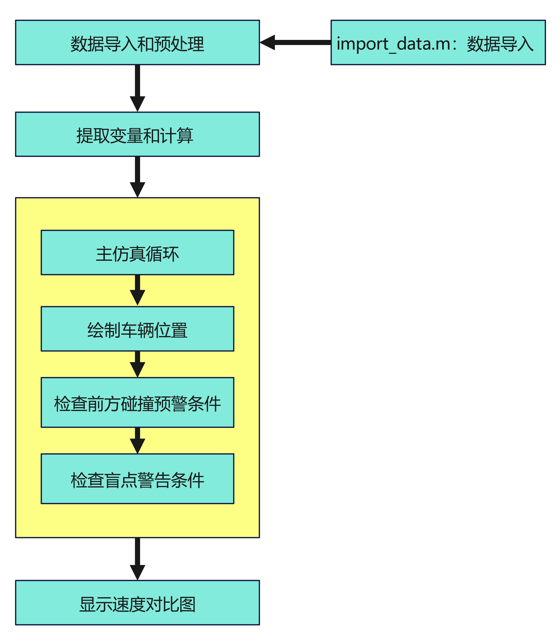
代码讲解
Tipps:仅对main.m简单讲解。该项目可以按需有偿讲解,同时提供后续答疑。
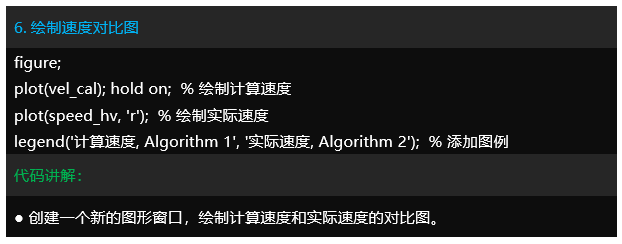
运行效果
– 先运行import_data.m,再运行main.m。
项目文档
Tipps:可根据您的需要有偿文档撰写及文献翻译。
– 文档格式:WORD、PPT (后续免费修改服务)
– 文献翻译:中译英、英译中 (后续免费修改服务)
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
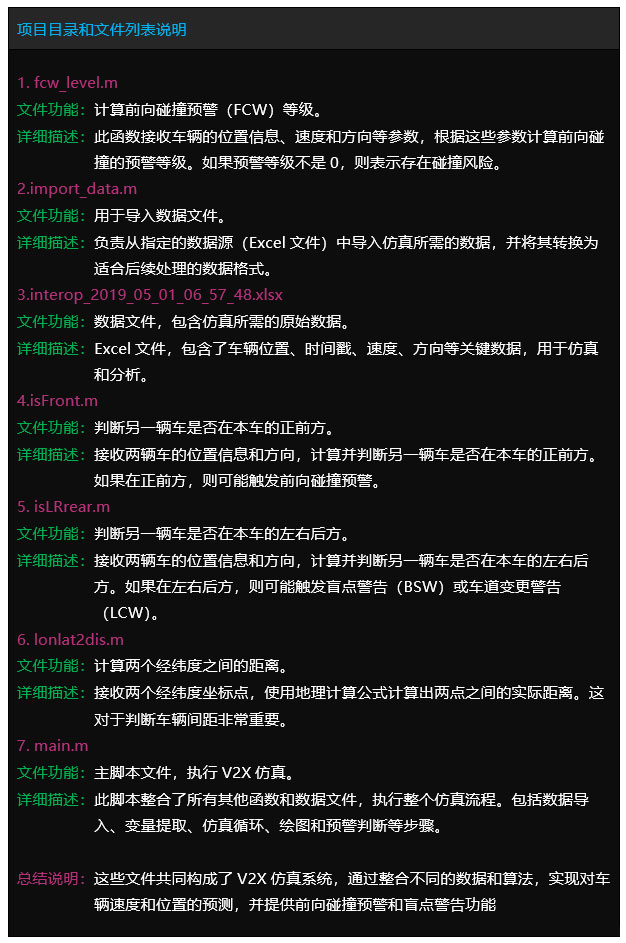
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
声明:本站所有项目资源都可以正常运行,亲测无错!而且我们录制了演示视频,在我们注明的环境版本下,项目运行效果完全和演示视频一致。客服QQ:下载须知
评论(0)