
随着智能制造与工业自动化的飞速发展,自动导引小车(AGV)在现代化仓储和生产过程中发挥着日益重要的作用。AGV 在完成物料输送和产品搬运等环节时,其路径规划的优劣直接影响到生产效率与运营成本。
项目信息
编号:MOG-113
大小:1.4M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024b
项目介绍
随着智能制造与工业自动化的飞速发展,自动导引小车(AGV)在现代化仓储和生产过程中发挥着日益重要的作用。AGV 在完成物料输送和产品搬运等环节时,其路径规划的优劣直接影响到生产效率与运营成本。
为应对复杂车间环境下的高效路径规划需求,本文提出了一种基于改进蚁群算法(Ant Colony Optimization, ACO)的 AGV 路径规划方法。在传统 ACO 的框架上,本文通过动态调节信息素挥发系数、引入精英蚂蚁策略以及结合 2-opt 局部搜索等手段,强化了算法的全局寻优能力并加速了收敛速度。首先,通过在信息素更新阶段增设精英策略,可对优良解施以更强的信息素强化,从而快速引导蚂蚁群向高质量解区域搜索;其次,利用动态调参机制使算法在初期侧重探索、后期增强利用,兼顾了全局性与收敛性;最后,2-opt 局部搜索则进一步改善了当前最优解在细节上的可行性与最优性。
基于栅格化的车间地图进行的多组仿真实验证明,所提算法在多种障碍布局下均能有效地规避碰撞并快速收敛到较优或最优路径,相较于传统蚁群算法在路径长度与计算效率上都有明显提升。研究结果表明,该改进算法具备较强的鲁棒性和适应性,为实现复杂环境下的 AGV 智能化调度提供了可行的技术路径与理论支撑。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
1.撰写内容
2.撰写流程
3.撰写优势
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
1.服务优势
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
运行效果
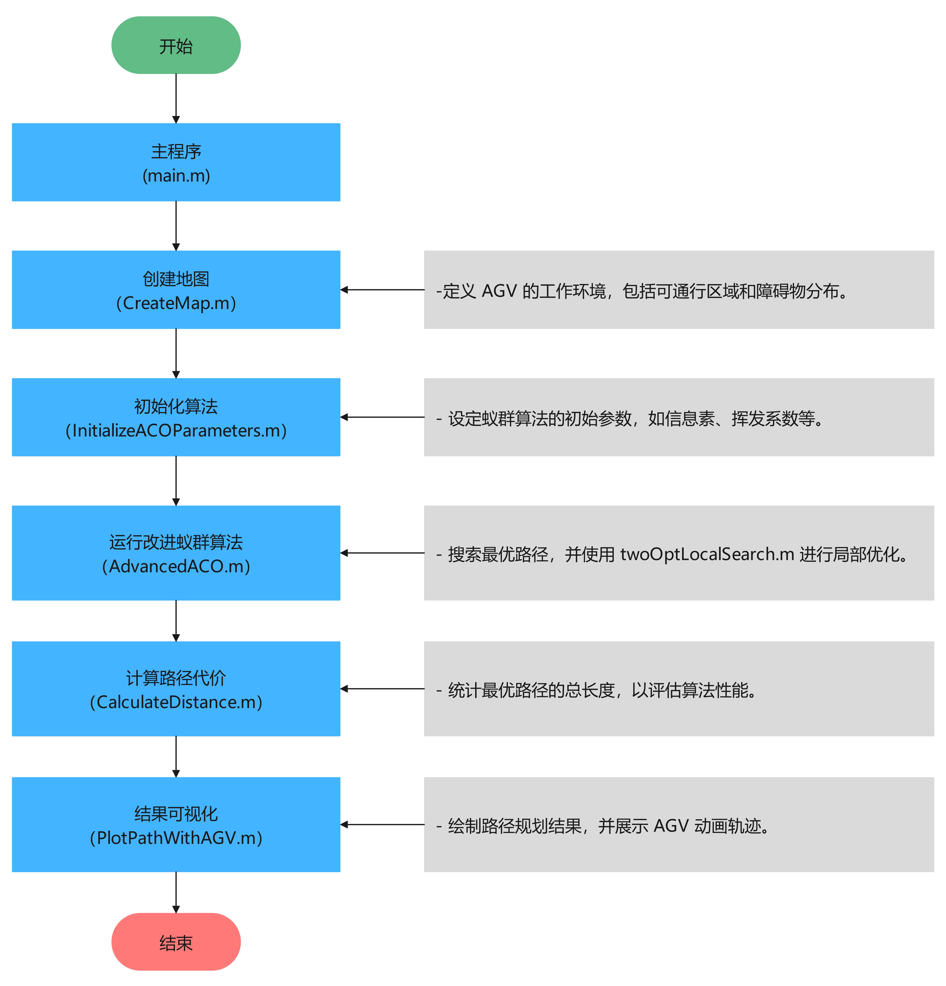
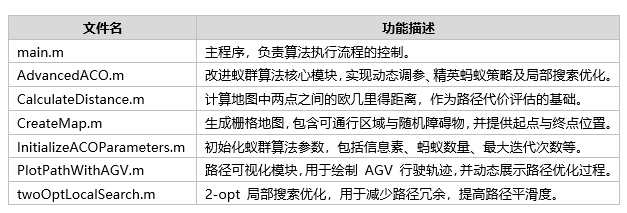
主要函数调用关系
(1)main.m调用CreateMap.m生成环境地图
(2)main.m调用InitializeACOParameters.m初始化蚁群算法参数
(3)main.m调用AdvancedACO.m执行改进蚁群算法,计算路径
(4)AdvancedACO.m调用CalculateDistance.m计算路径代价
(5)AdvancedACO.m调用twoOptLocalSearch.m局部优化路径
(6)main.m 调用PlotPathWithAGV.m绘制路径和收敛曲线
运行 main.m
1. 收敛曲线分析
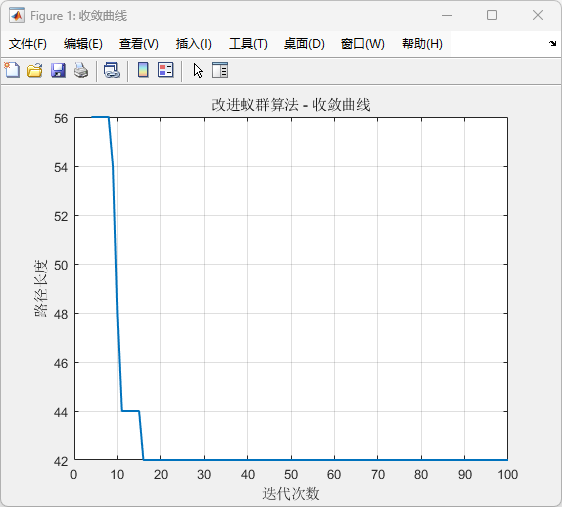
图 1 显示了改进蚁群算法(IACO)的收敛曲线。可以看出,在前 10 轮迭代内,路径长度从初始的 56 迅速下降至 42,随后基本保持稳定,说明算法在早期就能找到较优解,并在后续迭代中进一步优化。最终,算法在大约 15 轮左右收敛,且在后续迭代中未出现较大波动,表明改进的蚁群算法收敛速度较快,稳定性良好。
相比于标准蚁群算法(ACO)往往需要较多迭代才能收敛,改进 ACO 通过精英蚂蚁策略、动态调参及 2-opt 局部搜索,能够更快地找到最优解,并减少收敛过程中的振荡现象。
2. 路径规划结果
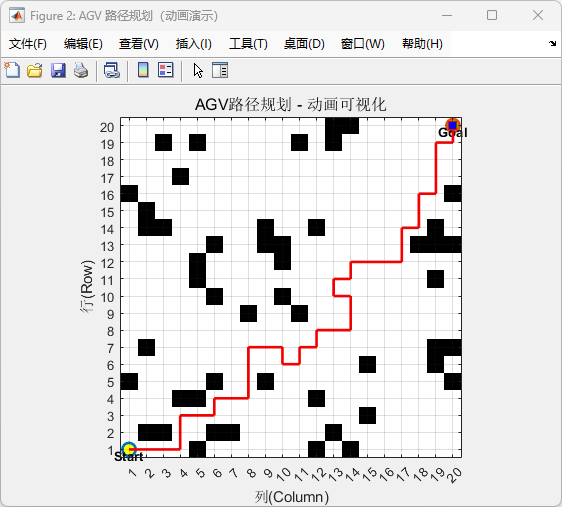
图 2 展示了AGV 在 20×20 栅格地图上的最优路径(红色折线)。地图中的黑色网格表示障碍物,AGV 需要从左下角(Start) 出发,沿着可通行区域,最终抵达 右上角(Goal)。
从路径规划结果来看:
(1)路径合理性:最终路径较为平滑,没有出现明显的冗余绕行;
(2)避障能力:AGV 能够成功避开随机分布的障碍物,且未出现碰撞;
(3)全局优化性:路径相较于传统 ACO 规划的结果更加直接、平滑,表明改进 ACO 具有较好的全局搜索能力。
3. 迭代优化过程
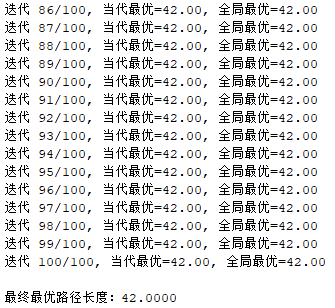
图 3 记录了算法在 86~100 轮的最优路径变化情况。从数据可以看出:
(1)从第 86 轮开始,算法已经稳定在全局最优解 42,后续迭代未再出现更优解,说明算法在 80 轮之前已经完成优化;
(2)路径长度稳定性:在 100 轮迭代内,最优路径未发生波动,表明优化后的蚁群算法避免了过度搜索导致的信息素过度集中问题,使得路径保持在全局最优解附近。
总结:
(1)最优路径长度:最终 AGV 在 20×20 地图上的最短路径为 42,相较于初始状态的 56,优化效果明显;
(2)收敛速度:改进 ACO 在前 20 轮内已经找到接近最优解,而传统 ACO 可能需要 50+ 轮才能达到同等水平;
(3)路径质量:优化后的路径更加平滑,避免了不必要的绕行,使 AGV 能够高效、稳定地执行导航任务。
总体来看,改进蚁群算法在 路径优化质量、收敛速度、稳定性 方面都优于传统 ACO,能够有效应用于 AGV 在复杂环境下的路径规划问题。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)