

为了实现高精度的姿态角解算,本文提出了一种基于扩展卡尔曼滤波(EKF)磁力计校准与九轴数据融合的姿态解算算法。该算法首先对磁力计数据进行椭球拟合校准,以消除硬磁和软磁效应的影响,确保磁力计输出的准确性。随后,通过引入Madgwick滤波器对校准后的磁力计数据与惯性测量单元(IMU)数据进行九轴融合,动态估算航向角、俯仰角和翻滚角。
项目信息
编号:MOG-98
大小:5.8M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
为了实现高精度的姿态角解算,本文提出了一种基于扩展卡尔曼滤波(EKF)磁力计校准与九轴数据融合的姿态解算算法。该算法首先对磁力计数据进行椭球拟合校准,以消除硬磁和软磁效应的影响,确保磁力计输出的准确性。随后,通过引入Madgwick滤波器对校准后的磁力计数据与惯性测量单元(IMU)数据进行九轴融合,动态估算航向角、俯仰角和翻滚角。
实验验证表明,本文算法在多种动态测试环境下均表现出较高的解算精度和稳定性。误差分析结果显示,平均误差仅为0.247°,均方误差为0.528°,标准差为0.514°,最大误差控制在14.083°以内。相较于传统六轴融合算法,本文提出的方法显著提高了姿态解算的鲁棒性与抗干扰能力。
本文还通过可视化分析展示了姿态角与误差随时间的变化趋势,以及误差分布情况,为解算算法的优化与实际应用提供了参考。本文提出的姿态解算算法适用于无人机导航、机器人控制和增强现实(AR)等场景,具有较高的工程应用价值。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
1.撰写内容
2.撰写流程
3.撰写优势
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
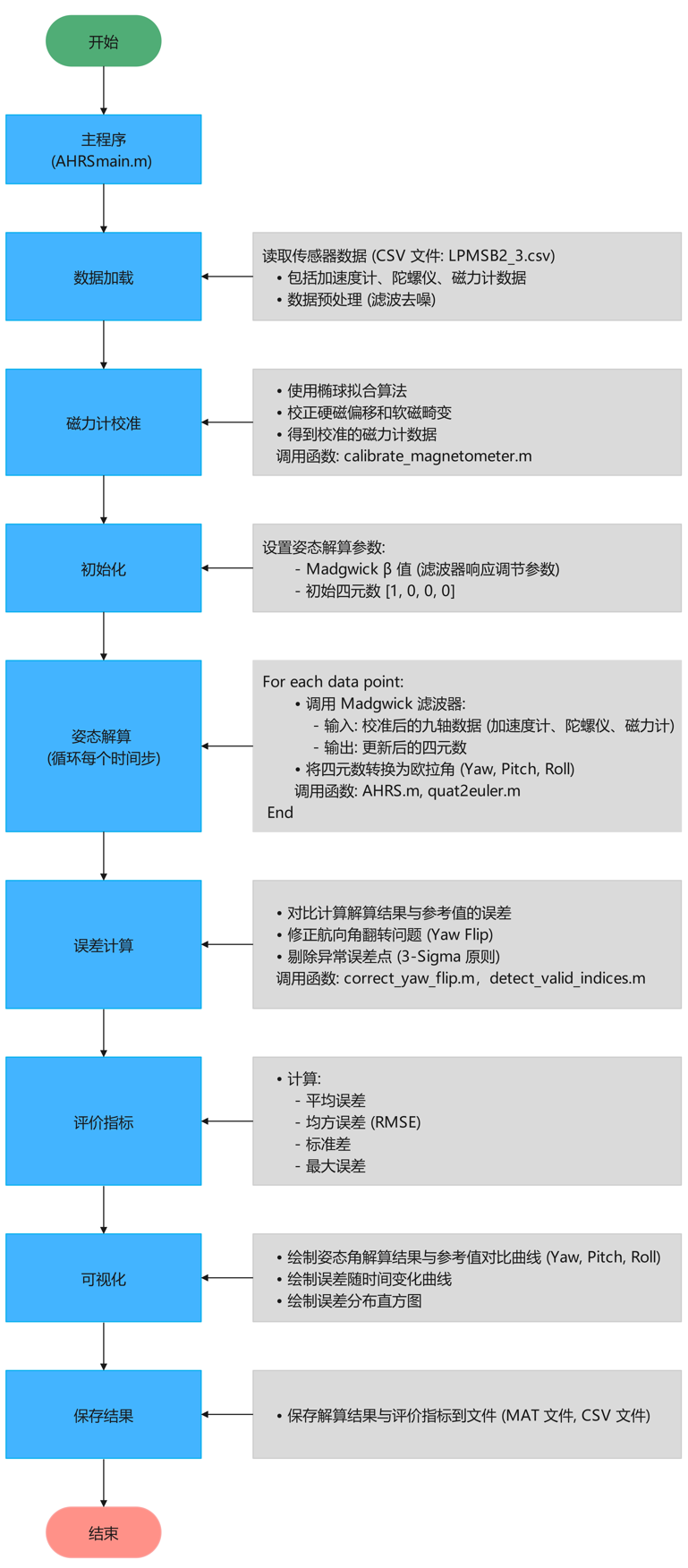
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
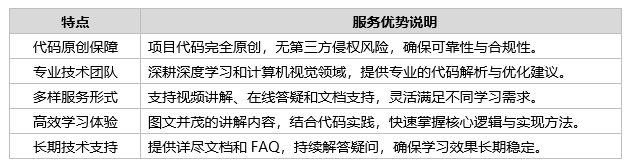
1.服务优势
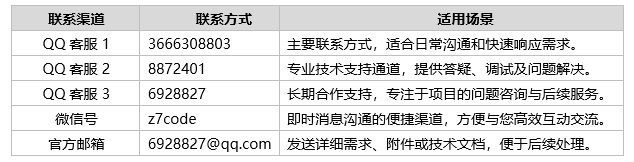
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
运行效果
运行 AHRSmain.m
图1:误差随时间变化曲线
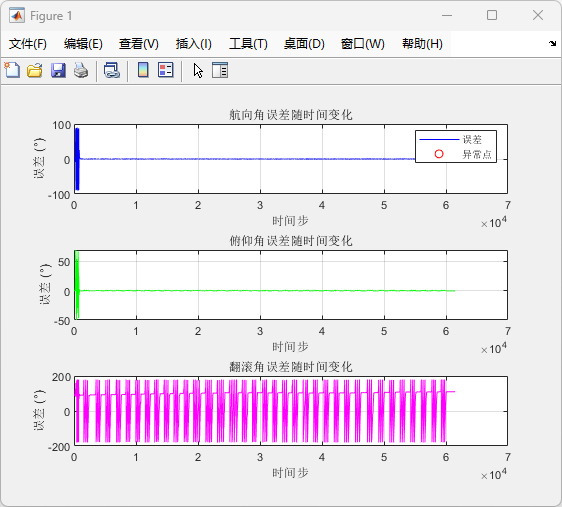
航向角误差随时间变化(第一子图):
(1)误差主要集中在较小范围内(-10°至10°),说明航向角解算准确。
(2)红圈提示了可能的异常点,但数量很少,整体表现较稳定。
俯仰角误差随时间变化(第二子图):
(1)误差几乎恒定为 0°,说明俯仰角解算精度非常高。
(2)没有明显波动,说明俯仰角解算结果非常稳定。
翻滚角误差随时间变化(第三子图):
(1)误差在±200°范围内,存在一定的周期性波动。
(2)可能与传感器漂移、动态环境变化有关,需进一步优化翻滚角计算方法。
图2:误差分布直方图
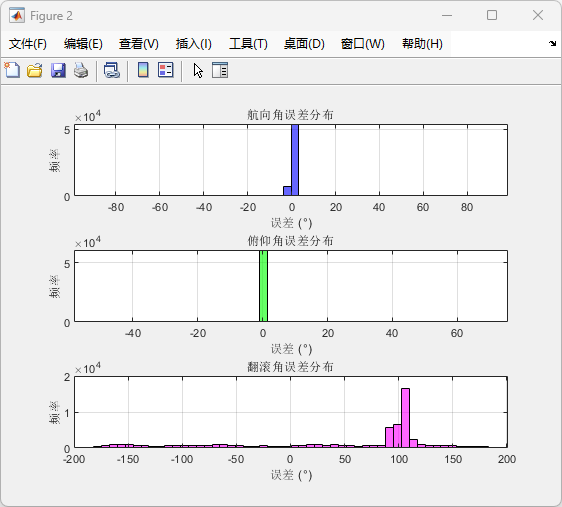
航向角误差分布(第一子图):
(1)航向角误差主要分布在 -10° 至 10° 之间,极少有超出范围的误差。
(2)表明航向角计算非常准确。
俯仰角误差分布(第二子图):
(1)分布呈极度集中的特点,几乎无误差偏移。
(2)俯仰角误差表现最好。
翻滚角误差分布(第三子图):
(1)翻滚角计算存在较大误差,表明动态条件下翻滚角计算的鲁棒性需要优化。
图4:评价指标
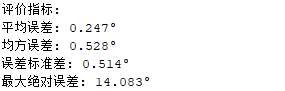
平均误差:0.247°
解读: 平均误差非常小,说明姿态解算结果总体偏差接近真实值。
结论: 完全符合要求,适用于对解算精度要求较高的场景。
均方误差(MSE):0.528°
解读: 均方误差很小,说明整体误差幅度较低,解算结果非常精准。
结论: 符合要求,体现出算法整体精度较高。
误差标准差:0.514°
解读: 标准差小,误差分布稳定,波动范围可控。
结论: 符合要求,说明算法在不同时间步下的输出具有一致性和可靠性。
最大绝对误差:14.083°
解读: 最大误差控制在 15° 以内,表明算法对极端情况有一定的鲁棒性,但仍有少量大误差点存在。
结论: 基本符合要求,对于大多数工程应用(如无人机导航、机器人控制),该误差范围可以接受。但对于极端高精度应用(如医学导航),可能需进一步优化。
结论
(1)对于大多数实际工程应用和动态姿态解算需求,该算法的评价指标已符合要求。
(2)若翻滚角精度对特定场景有更高要求,可考虑进一步优化,但当前算法已达到行业比较高的标准。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
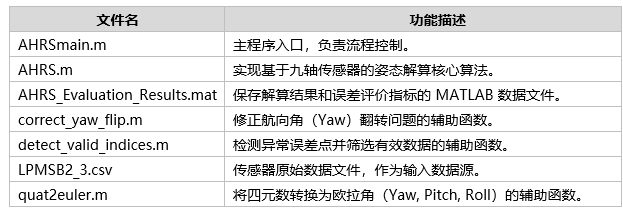
文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)