
本研究提出了一种基于 Dijkstra 算法的路径规划方法,利用 MATLAB 作为实现平台,结合随机障碍物生成的栅格地图,构建了一个完整的路径规划系统。
项目信息
编号:MOG-97
大小:4M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
本文提出了一种基于 Dijkstra 算法的路径规划方法,利用 MATLAB 作为实现平台,结合随机障碍物生成的栅格地图,构建了一个完整的路径规划系统。该系统包括地图生成、邻接矩阵构建、最短路径计算以及路径规划结果的可视化展示等关键模块。研究首先通过随机算法生成具有障碍物分布的二维栅格地图,障碍物的数量和分布具有一定的随机性,从而构建出复杂多变的地图环境。接着,通过邻接矩阵将栅格地图转化为节点与节点之间的连接关系,采用 Dijkstra 算法对图中的最短路径进行求解,最终在栅格地图上直观地绘制出从起点到终点的最优路径。
实验结果表明,该方法能够在不同地图环境下快速准确地计算出起点到终点的最短路径,同时具备良好的鲁棒性和适用性。无论是稠密障碍物分布还是稀疏障碍物分布,该系统都能提供稳定的路径规划性能。进一步的实验还表明,该方法具有较低的计算复杂度,适合在实时性要求较高的场景中使用。
本文的研究方法在自动驾驶、智能机器人导航等实际应用场景中具有重要的参考价值。通过简单的模块化设计,该方法还可以扩展至三维环境的路径规划以及动态环境中的障碍物避让问题,为复杂导航任务提供了潜在的解决方案。
项目文档
Tipps:提供专业的项目文档撰写服务,覆盖技术类、科研类等多种文档需求。我们致力于帮助客户精准表达项目目标、方法和成果,提升文档的专业性和说服力。
– 点击查看:写作流程
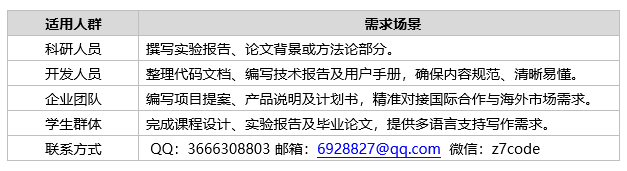
1.撰写内容
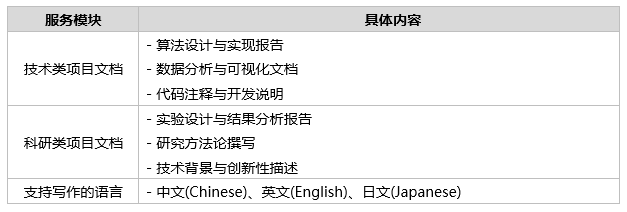
2.撰写流程
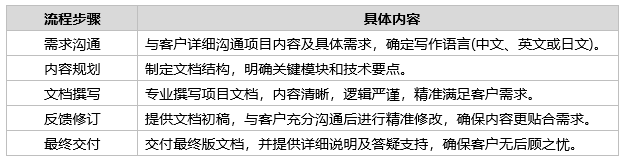
3.撰写优势
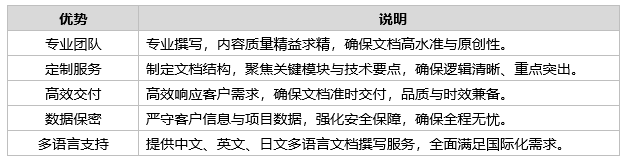
4.适用人群
期待与您的沟通!我们致力于为您提供专业、高效的项目文档撰写服务,无论是通过QQ、邮箱,还是微信,您都能快速找到我们。专业团队随时待命,为您的需求提供最优解决方案。立即联系,开启合作新篇章!
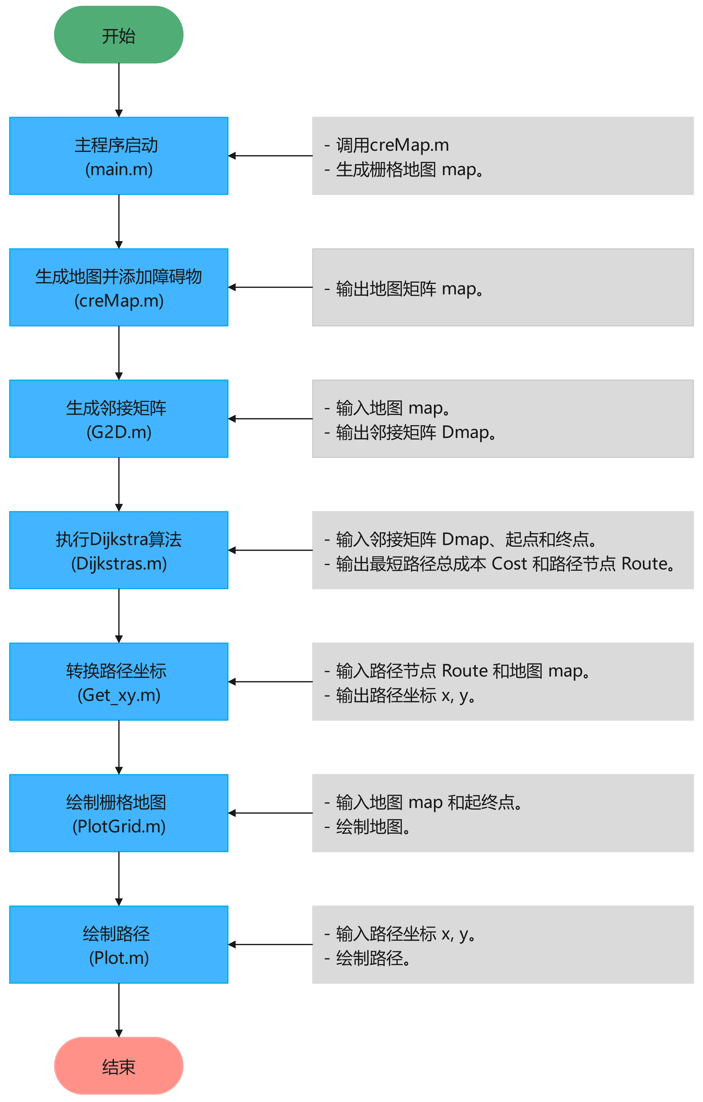
算法流程
Tipps:深入解析项目的算法流程,逐步探索技术实现的核心逻辑。从数据加载与预处理开始,到核心算法的设计与优化,再到结果的可视化呈现,每一步都将以清晰的结构和简洁的语言展现,揭示技术背后的原理与实现思路。
代码讲解
Tipps:我们致力于为您提供全面的项目代码解析服务,深入剖析核心实现、关键逻辑及优化策略,帮助您快速理解项目运行机制。同时,针对您在使用项目中可能遇到的难点,我们提供高效的后续答疑支持,确保问题得到及时、专业的解决。
无论您是初学者还是经验丰富的开发者,我们都能为您量身定制指导方案,助您从掌握到精通。如果您有任何需求或疑问,欢迎随时与我们联系!
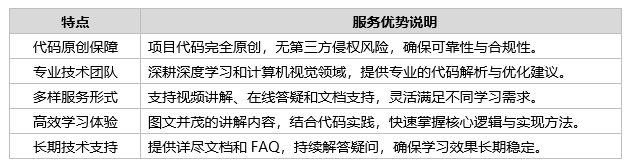
1.服务优势
2.联系方式
欢迎随时联系我们!我们将竭诚为您提供高效、专业的技术支持,量身定制解决方案,助您轻松应对技术挑战。
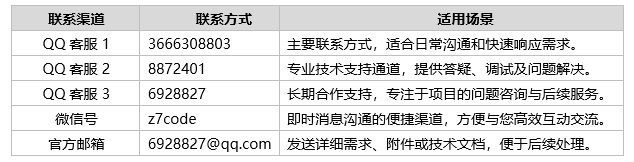
运行效果
运行 main.m
Dijkstra算法路径规划示意图
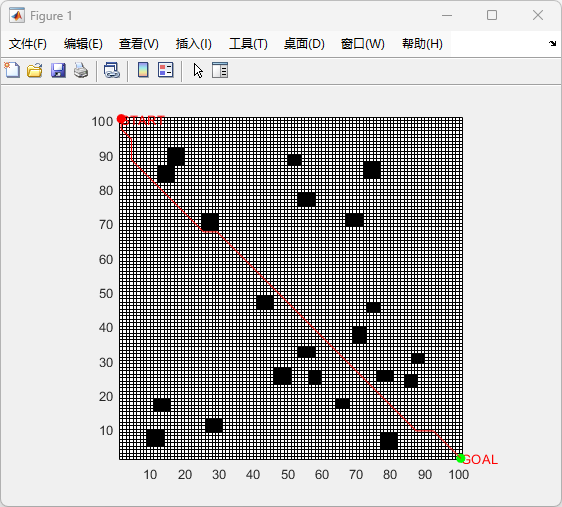
从这张图片可以看出,这是一个基于 MATLAB 绘制的二维栅格地图,图中展示了起点、终点、障碍物分布,以及通过 Dijkstra 算法计算出的最短路径。
以下是该图的具体含义:
1. 栅格地图背景
(1)黑色方块:表示地图中的障碍物区域(不可通行)。
(2)白色网格:表示可通行区域,每个白色小方格对应一个地图节点。
2. 起点与终点
(1)红色标记“START”:表示路径规划的起点,位于地图的左上角 (1, 100)。
(2)绿色标记“GOAL”:表示路径规划的终点,位于地图的右下角 (100, 1)。
3. 最短路径
(1)红色线条:表示通过 Dijkstra 算法计算出的从起点到终点的最短路径。这条路径避开了障碍物,并在可通行区域中尽量保持路径长度最短。
4. 地图网格
(1)该地图由 100×100 的栅格构成,每个网格代表地图中的一个节点。通过网格结构,清晰地表示了路径规划过程中的搜索空间和障碍物的分布。
这张图直观地展示了基于 Dijkstra 算法的路径规划结果,成功地从起点避开障碍物到达终点。这种可视化方式有助于验证算法的有效性,同时也能够用于机器人导航、自动驾驶等实际应用场景的路径规划任务。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
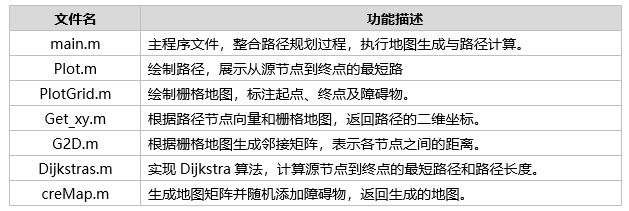
文件目录
Tipps:完整项目文件清单如下:

通过这些完整的项目文件,不仅可以直观了解项目的运行效果,还能轻松复现,全面展现项目的专业性与实用价值!
评论(0)