
随着智能交通和无人驾驶技术的迅猛发展,精确可靠的导航系统已成为提升车辆定位精度与安全性的重要技术。全球定位系统(GPS)和惯性导航系统(INS)在导航应用中各具优势:GPS提供全球定位信息,而INS则通过加速度计和陀螺仪等传感器实现高频率、高精度的短期姿态和位置估计。然而,由于GPS信号易受遮挡与干扰,INS误差会随时间累积,单一传感器在复杂环境下的应用效果有限。因此,本文提出并实现了一种基于卡尔曼滤波的GPS/INS集成导航系统,旨在通过传感器融合弥补单一导航系统的不足,提高定位精度和系统鲁棒性。
项目信息
编号:MOG-91
大小:14M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
随着智能交通和无人驾驶技术的迅猛发展,精确可靠的导航系统已成为提升车辆定位精度与安全性的重要技术。全球定位系统(GPS)和惯性导航系统(INS)在导航应用中各具优势:GPS提供全球定位信息,而INS则通过加速度计和陀螺仪等传感器实现高频率、高精度的短期姿态和位置估计。然而,由于GPS信号易受遮挡与干扰,INS误差会随时间累积,单一传感器在复杂环境下的应用效果有限。因此,本文提出并实现了一种基于卡尔曼滤波的GPS/INS集成导航系统,旨在通过传感器融合弥补单一导航系统的不足,提高定位精度和系统鲁棒性。
本文首先介绍了卡尔曼滤波算法在GPS/INS集成导航中的应用,重点讲解了如何利用卡尔曼滤波对GPS和INS数据进行融合,以精确估计位置、速度和姿态。具体地,使用卡尔曼滤波优化了位置、速度和姿态的估计过程,通过对GPS与INS数据的时空融合,实现了在GPS信号弱或失效情况下的高精度导航。此外,本文采用四元数方法对姿态进行表示,避免了欧拉角可能带来的奇异性问题,并在卡尔曼滤波框架下完成了各个传感器数据的融合和误差修正。
通过与单独使用GPS或INS的系统对比,实验结果验证了所提出的集成导航系统在动态环境下的优越性能,尤其在GPS信号弱或完全丢失的情况下,系统依然能保持较高的导航精度和稳定性。最后,本文提出了进一步提升系统性能的研究方向,包括结合其他传感器(如视觉、雷达等)的数据融合,以期为未来的导航技术发展提供理论依据和技术支持。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
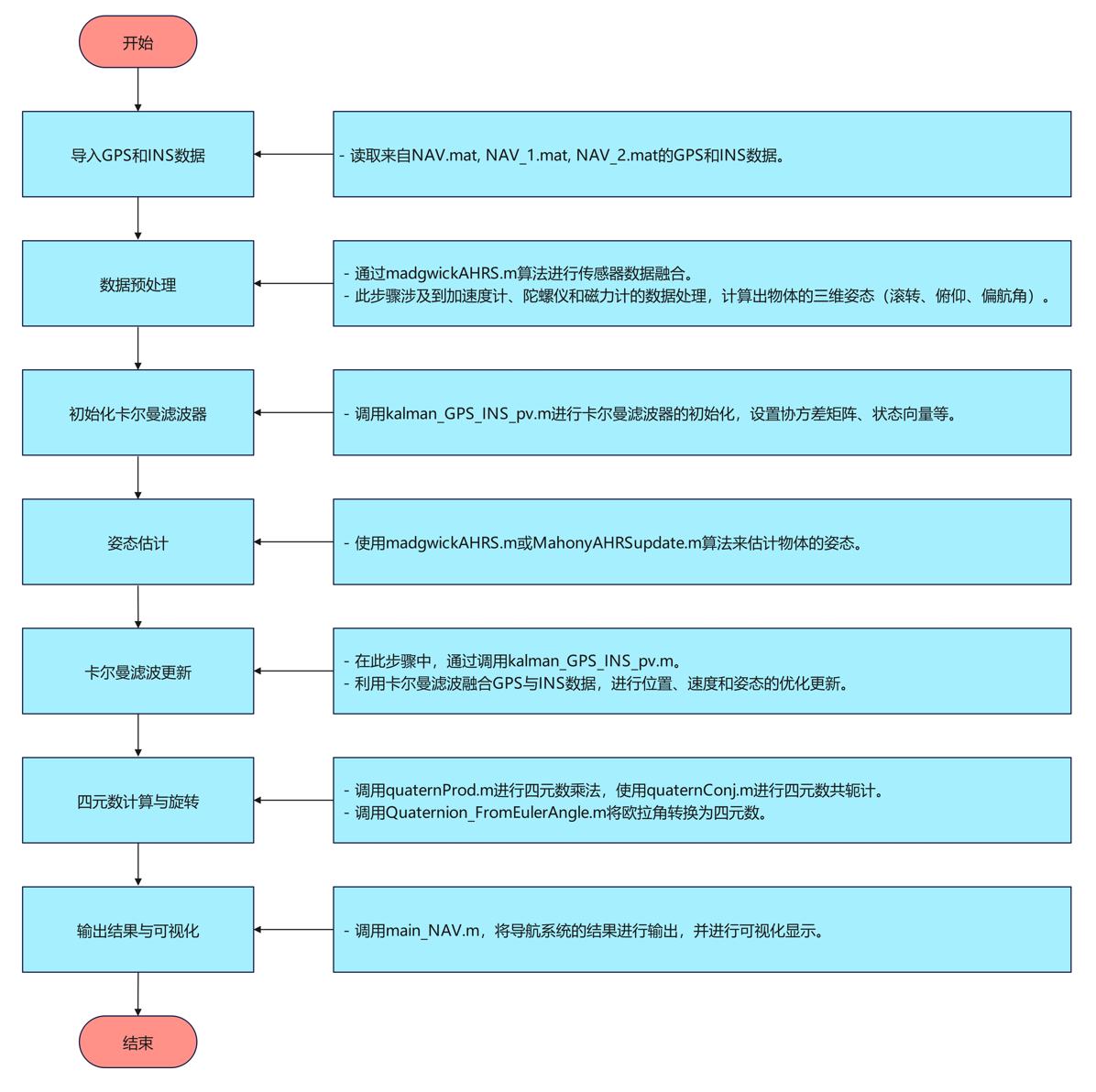
– 项目文档:写作流程
算法流程
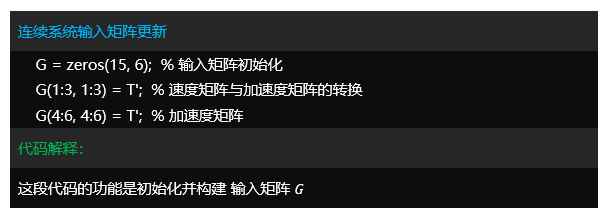
代码讲解
Tipps:仅对运行kalman_GPS_INS_pv.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 main_NAV.m
图1:该图展示了由GPS和INS数据融合后得到的动态姿态估计中的欧拉角变化
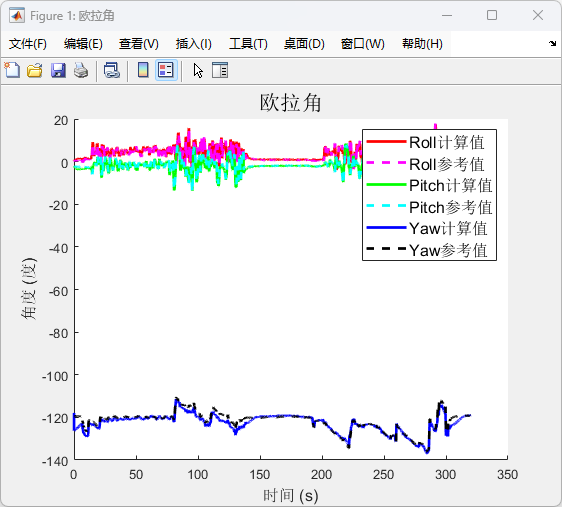
表现:欧拉角的计算值与参考值几乎完全重合,表明导航系统在姿态估计方面精度很高。系统能够平稳地跟踪飞行器的横滚、俯仰和偏航角变化,没有出现明显的误差或漂移。
评价:系统在姿态估计上表现非常好,能够精确估计飞行器的姿态变化,适用于高精度的动态控制。
图2:该图展示了GPS与INS融合导航中经度测量结果的对比分析
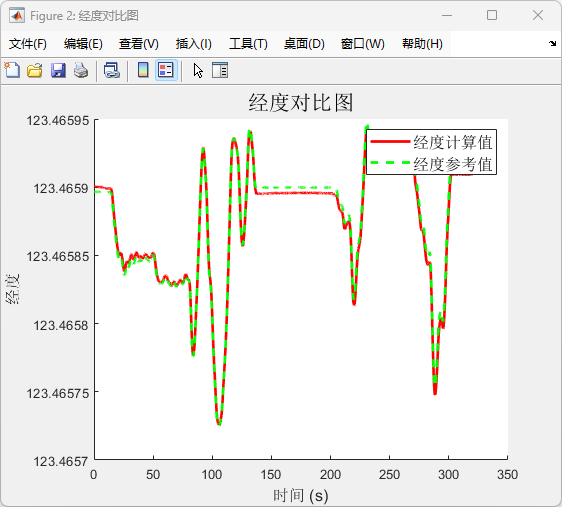
表现:计算值和参考值基本重合,精度较高。即使在快速变化的时段,系统依然能保持准确的跟踪,误差极小。
评价:系统的经度估计精度优秀,能够准确捕捉到经度的细微变化,稳定性和实时性表现很好。
图3:展示了GPS与INS融合导航中的纬度估计对比图
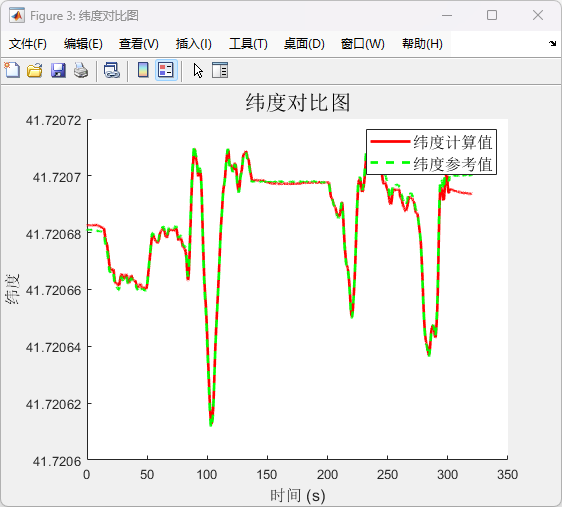
表现:计算值与参考值曲线高度重合,表现出相同的快速变化和稳定性。系统能够在复杂的轨迹变化中保持较高的精度。
评价:纬度估计方面,系统表现优秀,能够适应载体的动态变化,且误差几乎不可察觉。
图4:展示GPS与INS组合导航系统在高度(海拔)方面的对比图
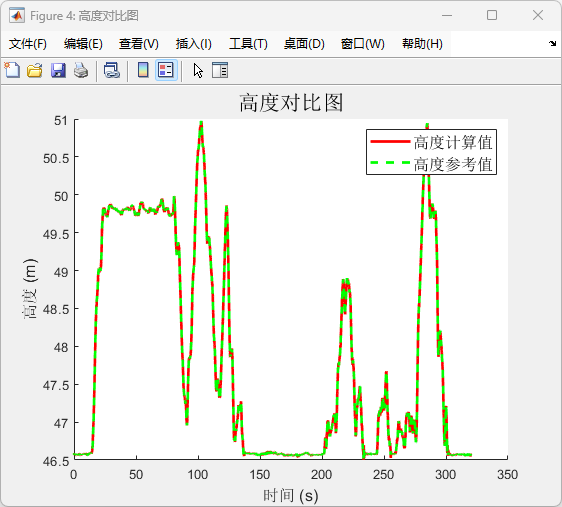
表现:高度值也高度吻合,尽管有一些明显的波动,但总体变化和参考值一致。系统能够准确捕捉高度的波动,并在快速变化时表现良好。
评价:系统能够准确估计高度变化,适用于高精度的垂直运动跟踪和高度控制。
图5:显示GPS与INS组合系统在北向速度的估计结果对比
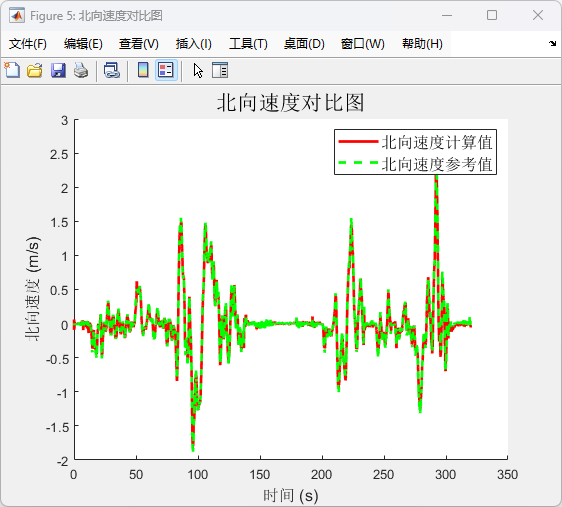
表现:计算值和参考值在大多数时间内高度一致。尽管速度有明显的加速和减速过程,但系统的响应很快,能够跟踪速度的快速变化。
评价:北向速度估计效果很好,系统能准确捕捉到载体的速度变化,特别是转向或避障时的加减速。
图6:显示GPS与INS组合系统在东向速度的估计结果对比
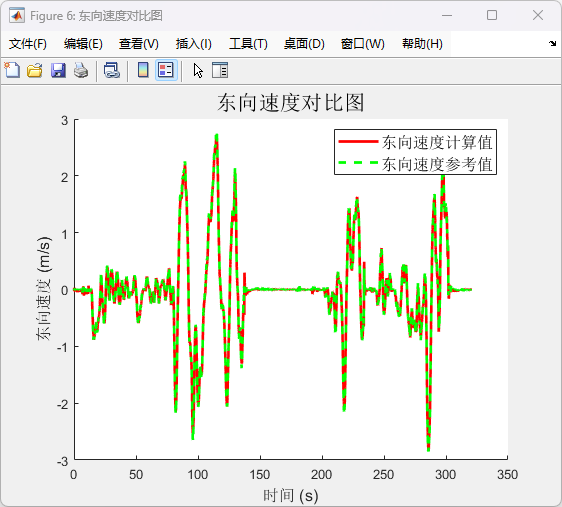
表现:东向速度变化较大,但系统能够快速响应并准确估计速度变化。特别是当速度剧烈变化时,计算值和参考值依然吻合。
评价:东向速度估计非常精确,系统能够处理快速变速的运动,并及时跟踪载体的东向运动状态。
图7:显示GPS与INS组合系统在地向速度的估计结果对比
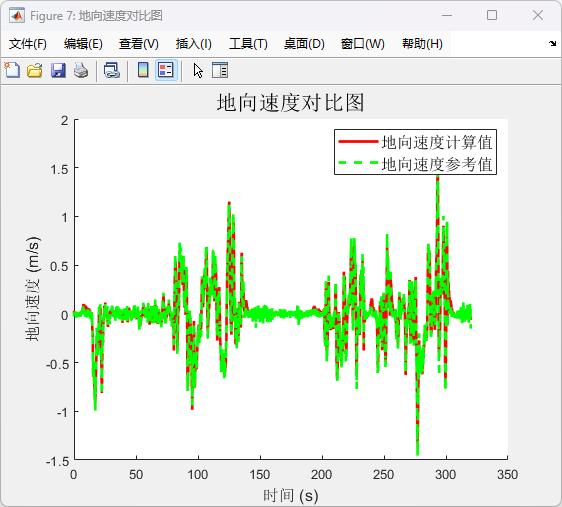
表现:地向速度变化较小,但系统能够准确地跟踪每个垂直运动变化,尤其在快速变化时,误差控制得很好。
评价:地向速度估计方面系统表现良好,能够准确追踪垂直运动,适用于高度控制和复杂环境中的垂直变化。
总结:
(1)从这些图表来看,导航系统在姿态估计、定位精度、速度变化跟踪等方面均表现出色,能够准确估计载体的动态状态。特别是在快速变化和复杂运动状态下,系统能够实时调整并提供高精度的反馈,几乎没有明显的误差或漂移。
(2)这些结果表明,导航系统具有很强的鲁棒性和实时性,适用于复杂环境中的高精度运动估计,特别是在无人驾驶、飞行器导航等领域,可以提供可靠的支持和高效的性能。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件

文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)