
随着无人系统、自动化设备以及智能交通系统的广泛应用,主从导航系统在定位、路径规划和控制方面发挥着至关重要的作用。尤其在复杂和动态的环境中,高精度的导航对准不仅能够提升定位精度,还能够确保系统在执行任务时的稳定性与可靠性。然而,由于各种外部环境干扰以及传感器的不确定性,主从导航系统在实际应用中往往存在误差,这些误差影响了系统的精度,甚至导致任务执行失败。因此,如何有效地进行主从导航系统的对准,并提高系统的精度,成为了智能导航领域中的一个研究热点。
项目信息
编号:MOG-80
大小:6M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
随着无人系统、自动化设备以及智能交通系统的广泛应用,主从导航系统在定位、路径规划和控制方面发挥着至关重要的作用。尤其在复杂和动态的环境中,高精度的导航对准不仅能够提升定位精度,还能够确保系统在执行任务时的稳定性与可靠性。然而,由于各种外部环境干扰以及传感器的不确定性,主从导航系统在实际应用中往往存在误差,这些误差影响了系统的精度,甚至导致任务执行失败。因此,如何有效地进行主从导航系统的对准,并提高系统的精度,成为了智能导航领域中的一个研究热点。
为了解决这一问题,本文提出了一种基于扩展卡尔曼滤波(EKF)的主从导航系统传递对准仿真方法。该方法通过仿真主导航系统的状态,并模拟其螺旋上升运动,模拟从导航系统在此过程中与主系统的偏差和噪声影响。通过引入初始偏差、随机噪声以及系统动态,仿真从导航系统在与主导航系统对比过程中的误差。为了优化从导航系统的误差估计与修正,本文采用了扩展卡尔曼滤波(EKF)算法来进行误差的校正和融合。扩展卡尔曼滤波作为一种非线性滤波算法,能够有效地处理系统状态的非线性特征,并通过实时更新卡尔曼增益来最小化系统的状态估计误差。
在仿真过程中,通过不断地与主导航系统进行对比和调整,系统能够实时校正误差并动态优化状态估计。仿真结果表明,所提出的基于扩展卡尔曼滤波的主从导航对准方法,能够在不同噪声和误差条件下显著提高从导航系统的精度。具体而言,无论是在低噪声环境下还是在高噪声环境中,系统均能有效减小位置、速度和姿态的误差。此外,本文还通过轨迹图与误差趋势图,直观地展示了主从导航系统在不同阶段的误差收敛过程,进一步分析了误差在不同噪声水平下的变化规律。
研究结果表明,扩展卡尔曼滤波不仅能有效提升从导航系统的精度,还能够适应复杂环境下的动态变化。这一方法具有较强的鲁棒性,并且能够在实际应用中满足高精度定位需求。最后,本文的研究成果为多传感器融合、导航对准技术的改进以及相关智能系统的精确控制提供了理论基础和实践指导。未来可以进一步探索结合其他类型传感器的数据融合算法,以进一步提升系统精度和鲁棒性,特别是在复杂的实际应用场景中,如无人驾驶、航空航天以及机器人技术等领域。。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
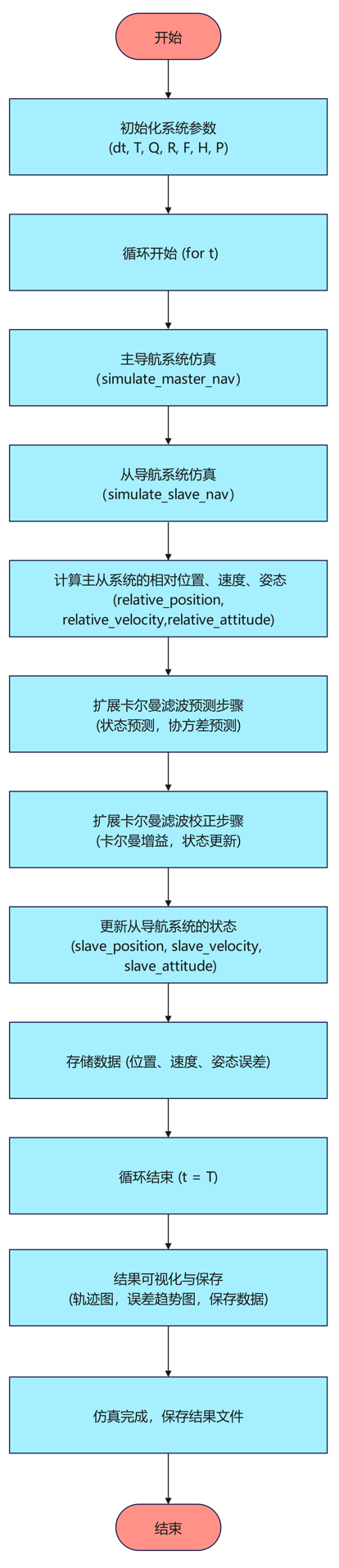
– 项目文档:写作流程
算法流程
代码讲解
Tipps:仅对运行main_script.m传递对准部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
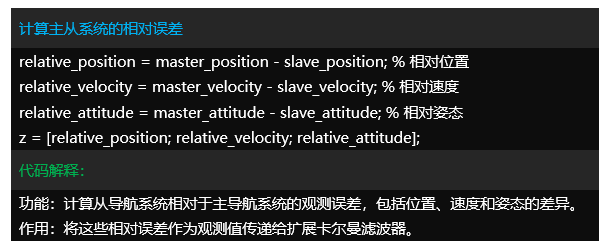
传递对准的主要逻辑是:
(1)计算相对误差:通过主从系统状态的比较,得到观测误差。
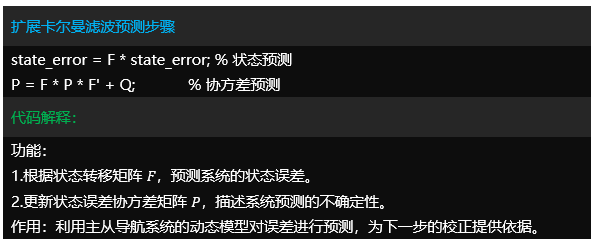
(2)预测步骤:利用系统动态模型预测状态误差。
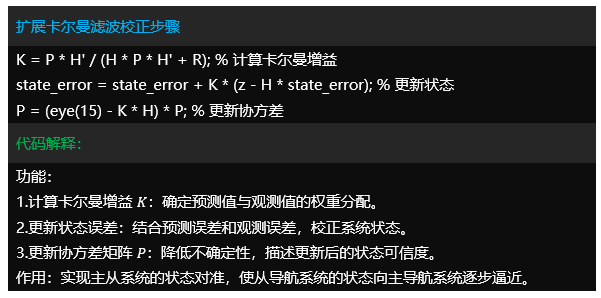
(3)校正步骤:结合观测值校正状态误差,调整从导航系统状态。
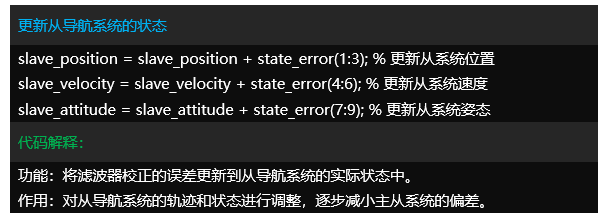
(4)状态更新:根据校正结果更新从导航系统的轨迹和状态。
这部分核心代码完整实现了主从导航系统的传递对准机制,是整个程序的关键部分。
运行效果
运行 main_script.m
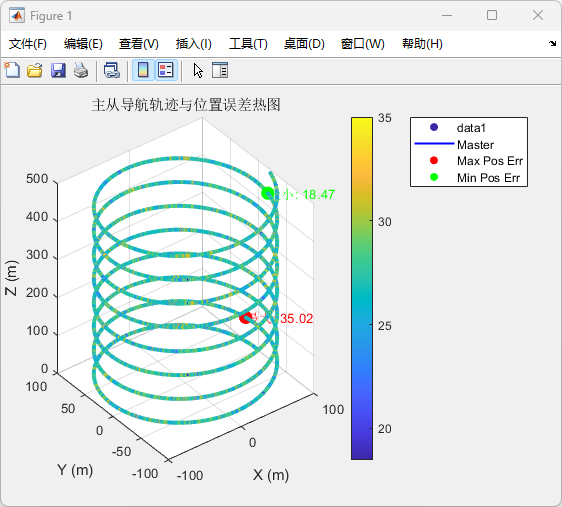
图1:主从导航轨迹与位置误差热图
含义:
(1)图中展示了主导航和从导航系统的轨迹,主导航轨迹以蓝线标示,从导航轨迹以散点和误差热图表示。
(2)散点的颜色代表位置误差的大小,颜色从蓝色(误差较小)到红色(误差较大)逐渐变化。
(3)最大位置误差和最小位置误差点通过红色和绿色标记,并附带误差值注释。
分析:
(1)从轨迹中可以看出主导航系统按照螺旋上升运动规律运行。
(2)从导航系统的轨迹偏离主导航轨迹,并且在某些位置误差较大(例如标注的红点)。
(3)通过扩展卡尔曼滤波的误差校正机制,随着时间的推移误差逐渐减小。
(4)图示中误差分布较为均匀,整体系统表现出较好的误差收敛特性。
图2:误差收敛趋势图
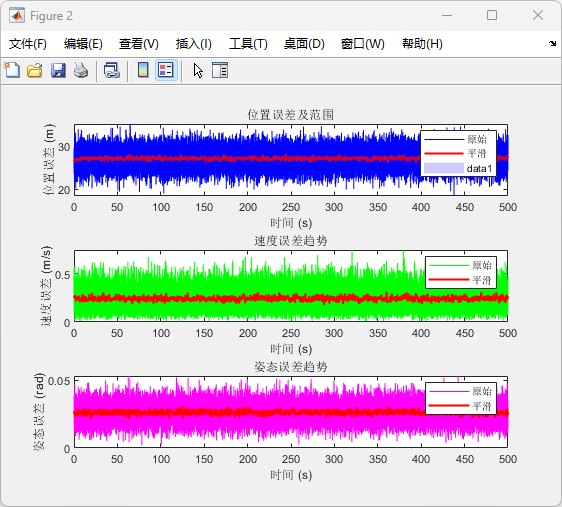
含义:
(1)图中分为三个子图,分别展示位置误差、速度误差和姿态误差随时间的变化趋势。
(2)原始误差以较细的线条显示,平滑误差以较粗的线条显示,并用阴影表示标准差范围。
分析:
1.位置误差:
(1)初始阶段误差较大,随着时间的推移,位置误差逐渐趋于稳定。
(2)平滑误差线显示系统在约 50 秒后收敛到 25~30 米的误差范围内。
2.速度误差:
(1)初始速度误差波动较大,但逐步收敛到 0.2 米/秒以下。
(2)整体表现出快速收敛特性,误差较小。
3.姿态误差:
(1)初始阶段误差波动在 0.04~0.05 弧度之间,随着时间推移略有下降。
(2)最终稳定在约 0.03 弧度的范围内,表明姿态误差的校正效果较好。
图3:误差日志
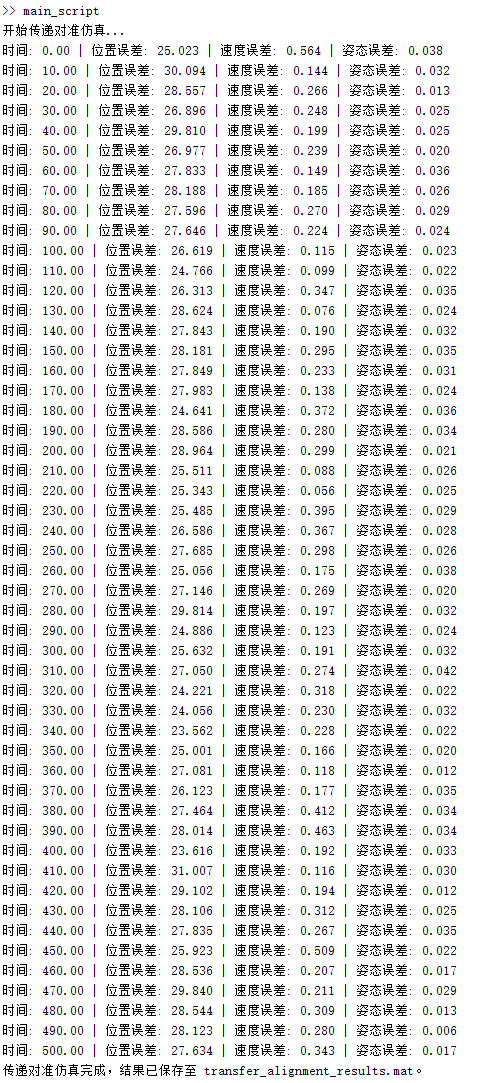
含义:
(1)图展示了各时间点的误差数据日志,包括位置误差、速度误差和姿态误差。
(2)显示了仿真过程中主从导航误差校正的实时数值。
分析:
(1)初始时刻(时间为 0 秒)位置误差为 25 米,速度误差为 0.56 米/秒,姿态误差为 0.038 弧度。
(2)随着时间的推移,误差逐渐趋于稳定,最终在时间为 500 秒时,位置误差降至 27.634 米,速度误差降至 0.343 米/秒,姿态误差降至 0.017 弧度。
(3)日志显示误差的动态变化特性,与图2中的收敛趋势一致。
综合分析
1.误差校正效果:
(1)扩展卡尔曼滤波在本仿真系统中表现良好,能够有效减小从导航系统的误差。
(2)尤其是位置和速度误差,展现出较强的收敛能力。
2.性能评估:
(1)主从系统在不同阶段(初始、过渡、稳定)均表现出合理的误差动态调整能力,系统的鲁棒性较高。
(3)姿态误差相对较小,说明姿态对准的稳定性较强。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)