
本研究介绍了一种基于MATLAB的自动泊车系统的设计与实现,重点解决水平与垂直泊车场景中的问题。
项目信息
编号:MOG-48
大小:11M
运行条件
Matlab开发环境版本:
– Matlab R2020b
项目介绍
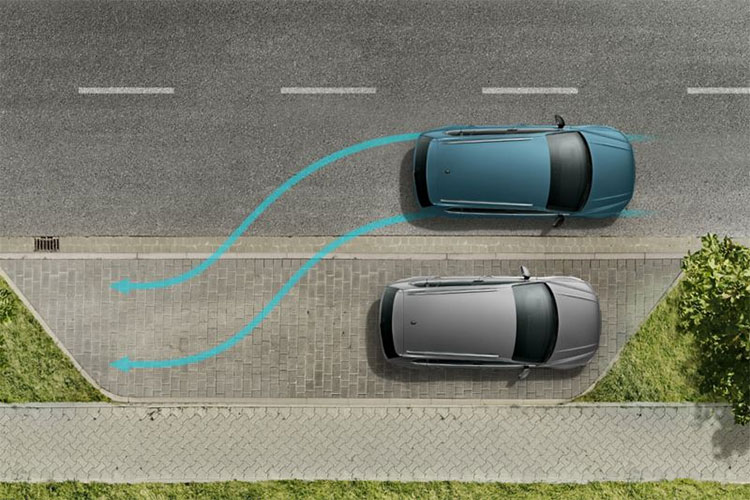
本文介绍了一种基于MATLAB的自动泊车系统的设计与实现,重点解决水平与垂直泊车场景中的问题。该系统集成了图像处理和控制算法,能够自动检测停车位并引导车辆完成泊车。通过分析图像数据(如10.png),并利用Horizontal.m和Vertical.m等自定义函数,系统能够计算最优的泊车路径。此研究旨在提高在有限空间内泊车的效率和安全性。实验结果表明,该系统能够高精度地完成泊车任务,为自动驾驶技术的发展提供了重要支持。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
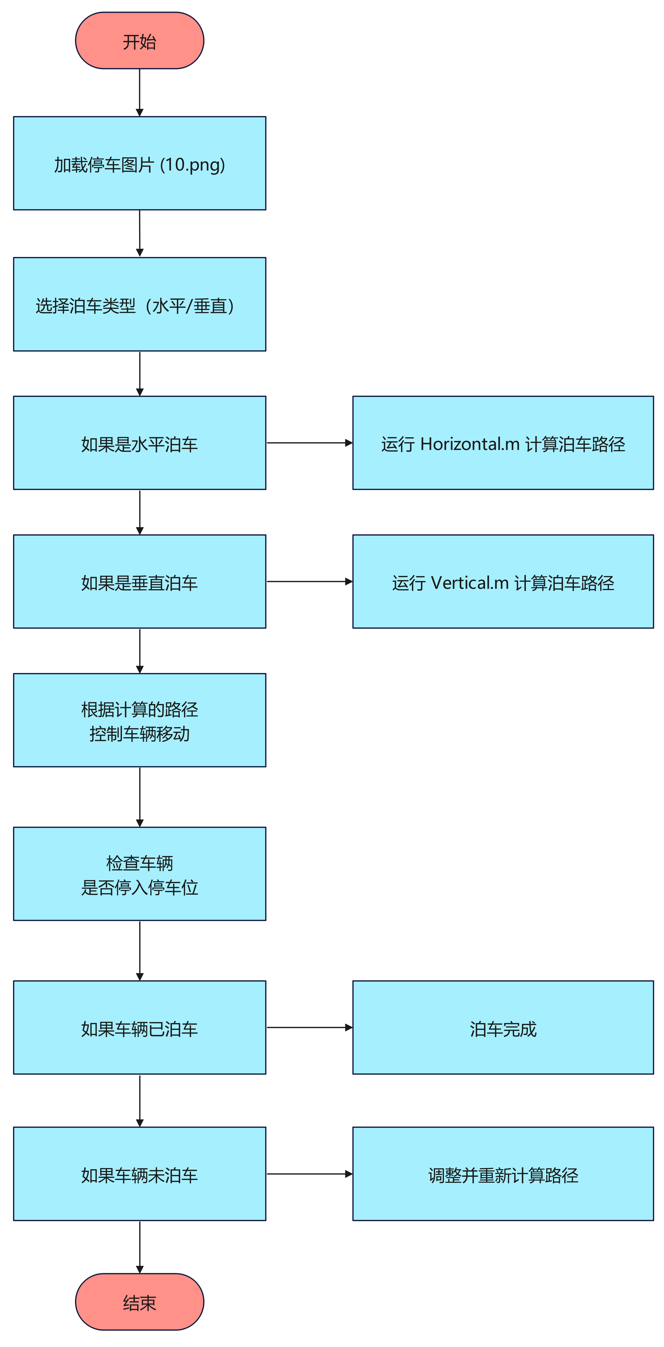
– 项目文档:写作流程
算法流程
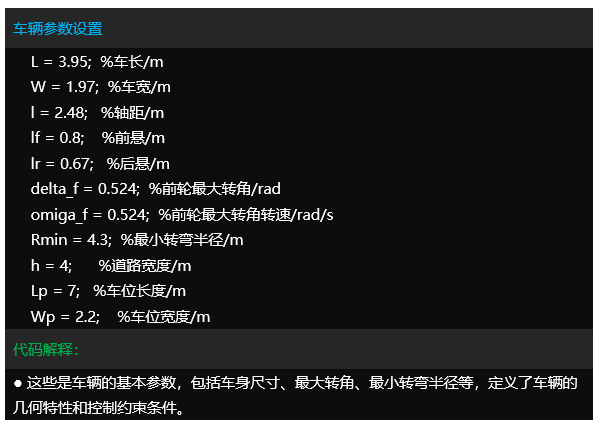
代码讲解
Tipps:仅对Horizontal.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 Vertical.m
垂直泊车效果
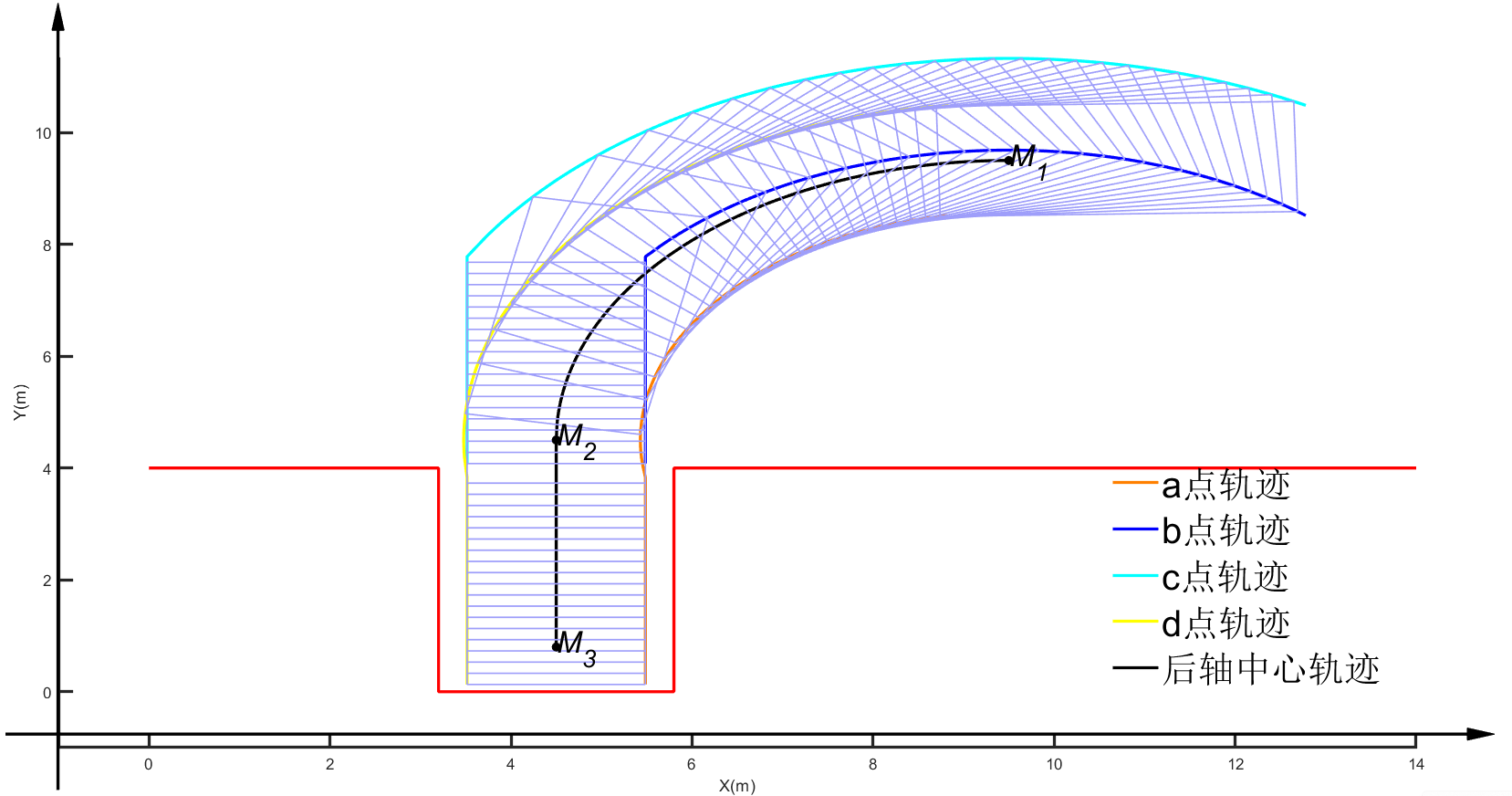
(1)a点轨迹:表示车辆某一参考点(可能是车身的一角)在垂直泊车时的轨迹。
(2)b点轨迹:表示车辆另一参考点(例如车尾)的轨迹。
(3)c点轨迹:表示车辆的第三个参考点的轨迹。
(4)d点轨迹:表示车辆的第四个参考点的轨迹。
(5)后轴中心轨迹:表示车辆后轴中心的运动轨迹,通常用于控制车辆的整体转向与泊车路径。
图中的 M1、M2、M3 点可能代表的是车辆在泊车过程中重要的关键位置,显示了车辆在泊车过程中如何调整位置以及如何通过曲线进入停车位。
运行 Horizontal.m
水平泊车效果
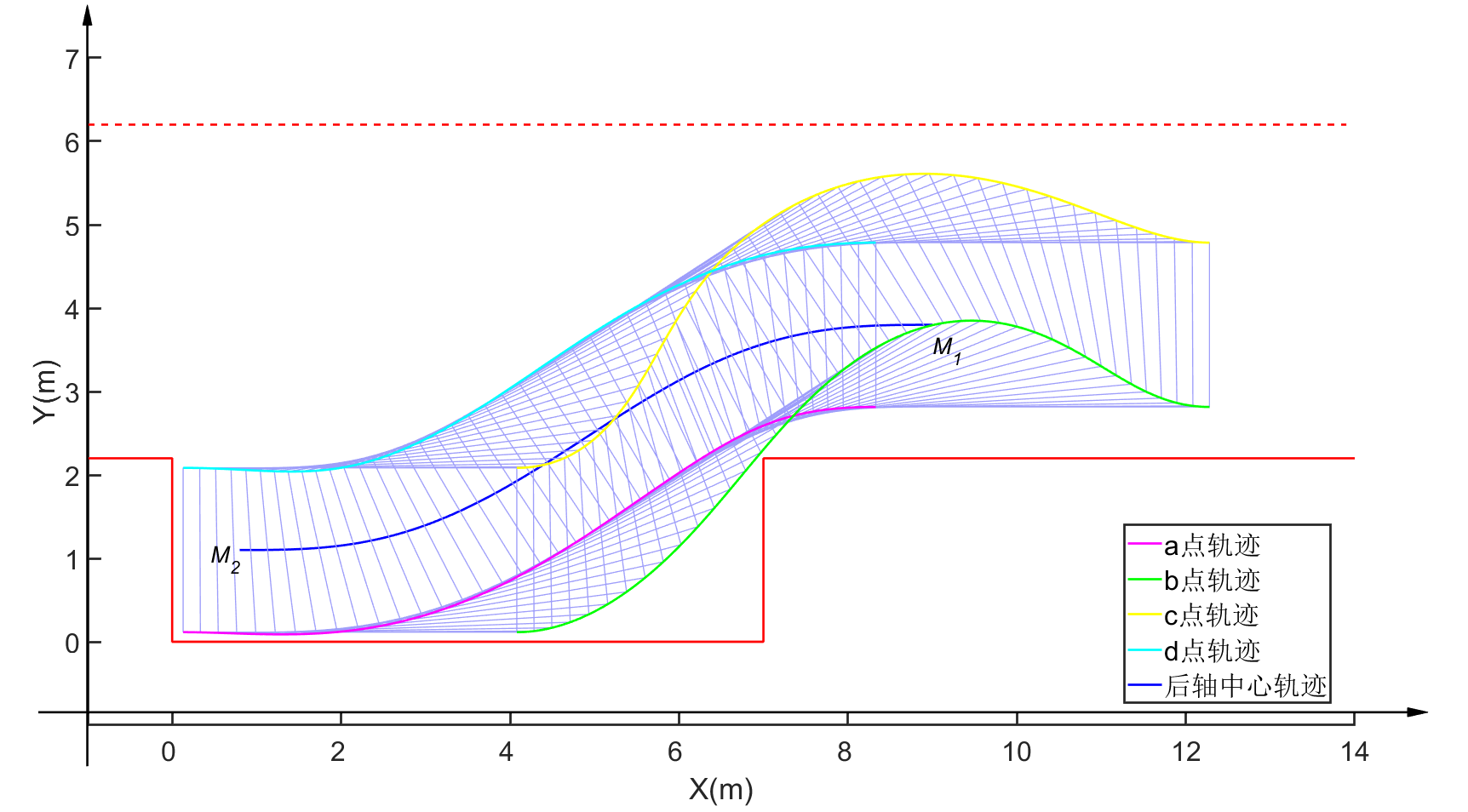
与垂直泊车类似,图中也有不同点的轨迹:
(1)a点轨迹、b点轨迹、c点轨迹、d点轨迹:代表车辆在水平泊车过程中不同位置的移动轨迹。
(2)后轴中心轨迹:表示车辆后轴中心的运动轨迹,这对于水平泊车过程中的调整和精确控制尤为重要。
图中的 M1 和 M2 点可能是关键的控制点或泊车过程中的目标位置,通过这些点的轨迹计算来引导车辆准确进入停车位。
这些图展示了车辆如何根据不同的路径规划(水平或垂直)来进行自动泊车,每条轨迹表示车辆不同部分的运动方式,帮助系统更好地规划停车路径并准确停入指定位置。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)