

在智能物流领域,室内送餐机器人路径规划是一个关键问题。本文提出了一种基于蚁群优化(ACO)和A算法的多目标路径规划方法,用于解决旅行商问题(TSP)。
项目信息
编号:MOG-47
大小:3M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
在智能物流领域,室内送餐机器人路径规划是一个关键问题。本文提出了一种基于蚁群优化(ACO)和A算法的多目标路径规划方法,用于解决旅行商问题(TSP)。首先,使用A算法规划机器人在两点间的最优路径,并计算路径距离;然后,蚁群算法根据各点间的路径长度,优化机器人访问多个目标点的顺序。通过结合两种算法的优点,该系统实现了从起点出发、访问多个目标点并返回起始点的最优路径规划。实验结果表明,该方法在室内送餐机器人的路径规划中表现出良好的效果和计算效率。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
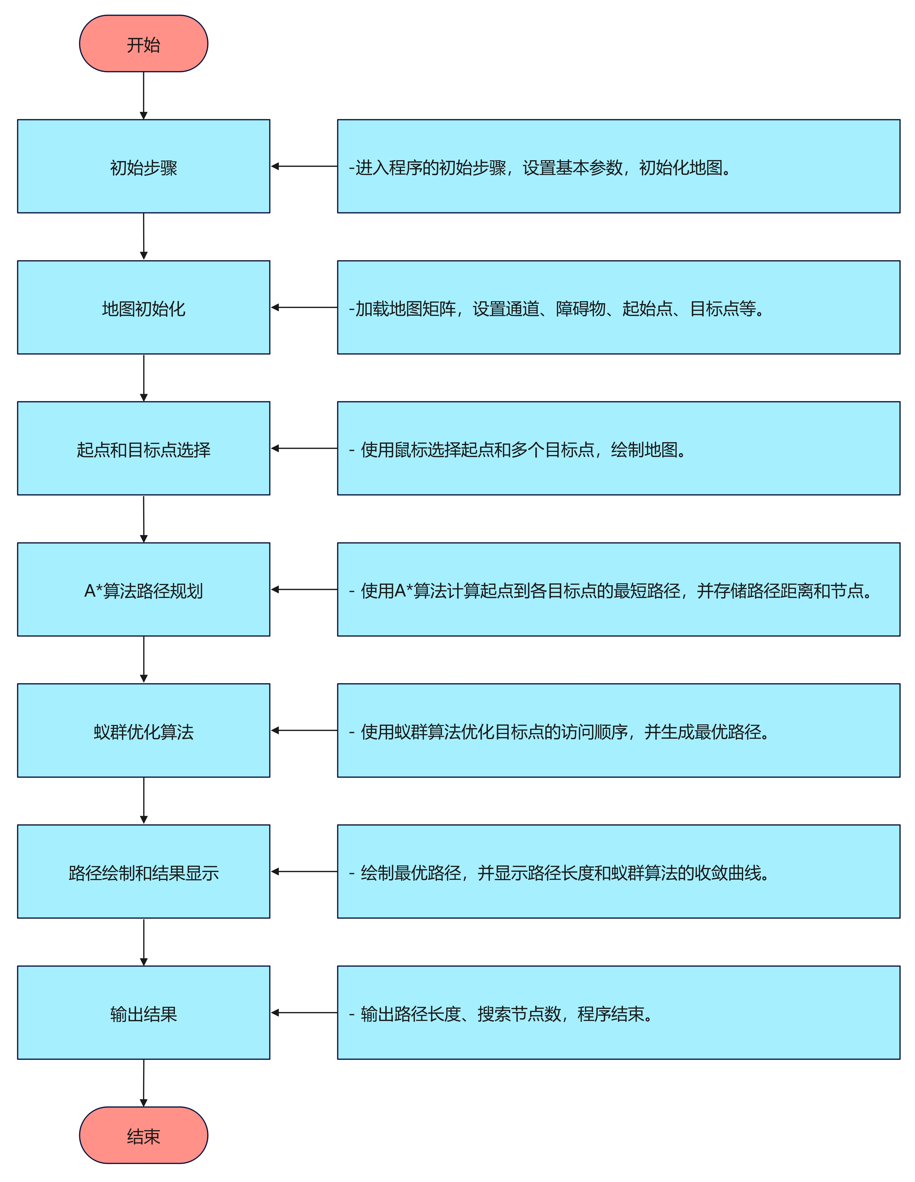
– 项目文档:写作流程
算法流程
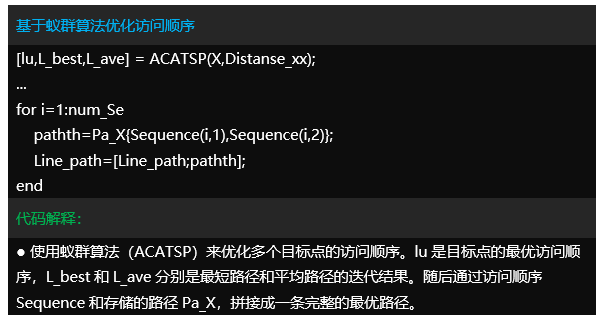
代码讲解
Tipps:仅对A_Ant_s.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 A_Ant_s.m
图1:
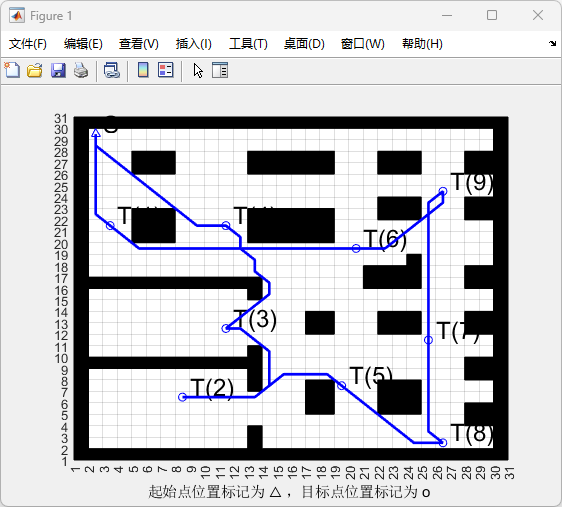
(1)含义:图1展示了基于A*算法规划出的机器人路径,标记为起始点(△)和多个目标点(T)。每个蓝色路径表示机器人从一个目标点移动到下一个目标点的路径。黑色块表示障碍物,机器人需要避开这些障碍物。
(2)功能:机器人通过A*算法计算两个点之间的最短路径,规划从起点经过多个目标点的最优路径,并最终返回起点。该图展示了送餐机器人如何在复杂的室内环境中移动。
图2:
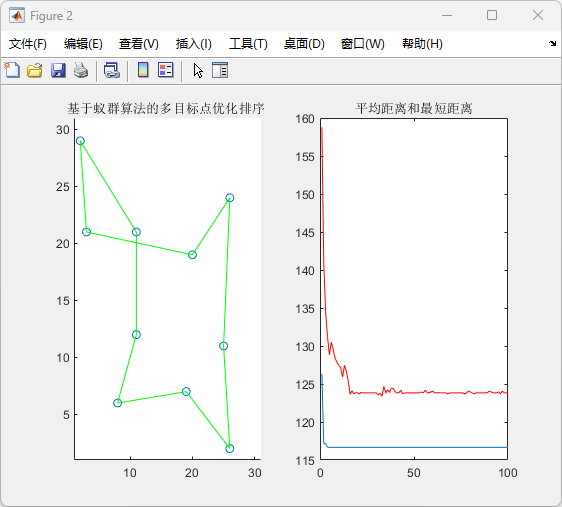
(1)左图:显示了基于蚁群优化算法优化后的多目标点访问顺序。蚁群算法用于解决旅行商问题(TSP),即如何以最短的路径访问所有目标点。绿色线表示优化后的访问顺序,连接多个目标点。
(2)右图:展示了平均路径长度和最短路径的收敛曲线。随着迭代次数的增加,蚁群算法逐渐找到较短的路径,最终趋于收敛。红色曲线是平均距离,蓝色曲线是最短路径长度。
图3:数值输出
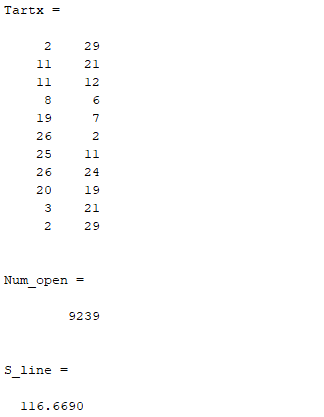
(1)Tartx:表示目标点的坐标。该矩阵的每一行对应于一个目标点的位置,例如,坐标 (2,29) 和 (11,21) 分别表示两个目标点的坐标。
(2)Num_open:表示A*算法在路径规划过程中所打开的节点数,9239表示该算法在计算最优路径时搜索了9239个节点。
(3)S_line:表示总路径长度,116.6690表示机器人按照规划的路径从起点经过所有目标点并返回起点的总路径长度。
这些图和数据结合展示了机器人如何在室内环境中有效地规划路径,访问多个目标点,并且最终找到最优路径。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)