

随着无人机技术的快速发展,无人机的路径规划成为智能交通、物流、农业和军事领域中的重要研究课题。
项目信息
编号:MOG-46
大小:10M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
随着无人机技术的快速发展,无人机的路径规划成为智能交通、物流、农业和军事领域中的重要研究课题。本文设计并实现了一套基于人工蜂群算法(ABC算法)的多无人机与单无人机路径规划系统,涵盖二维和三维环境下的路径规划。系统通过引入适应度函数进行路径优化,使用样条曲线生成平滑的无人机路径,并提供多维度环境设置。实验结果表明,该系统能够有效地规划出最优路径,满足复杂环境中的无人机任务需求,具有较强的实用性和扩展性。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
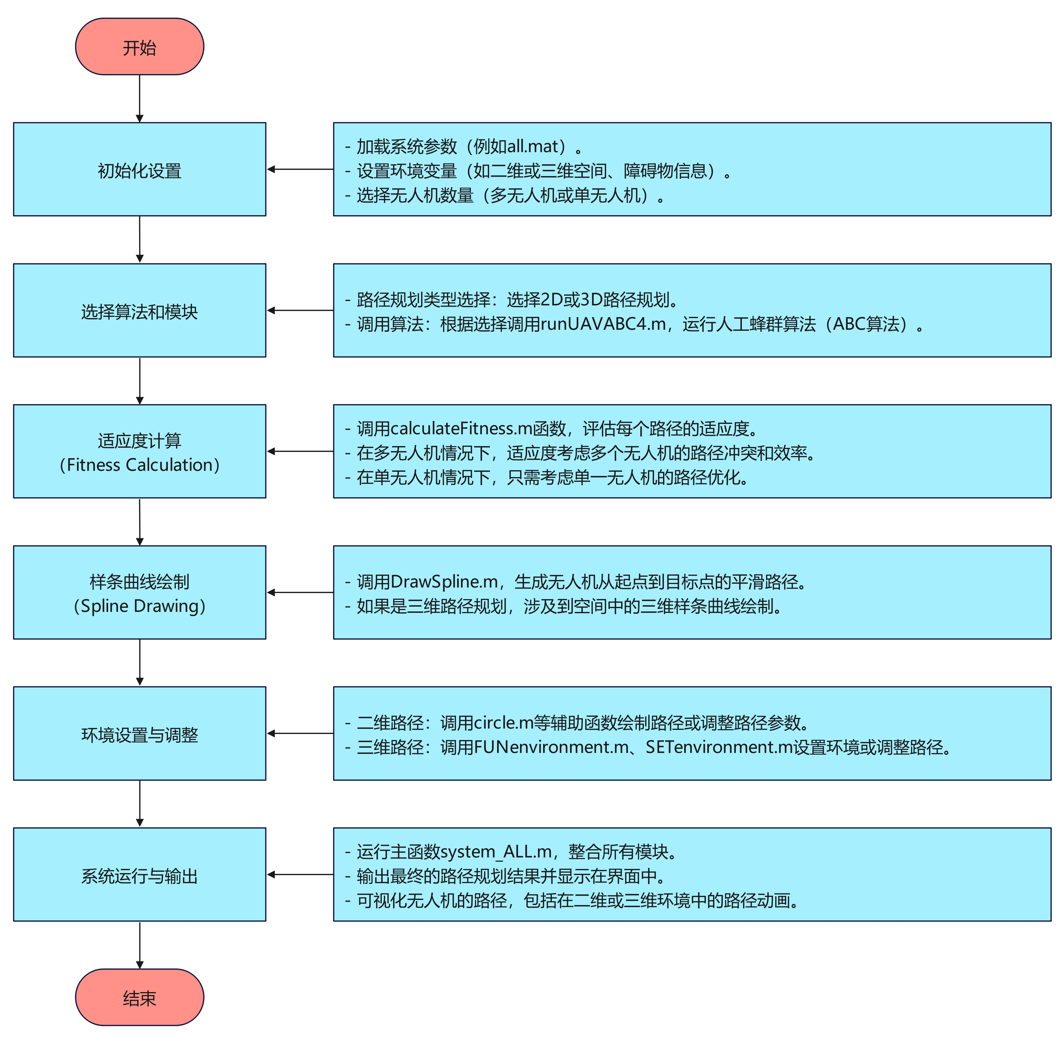
– 项目文档:写作流程
算法流程
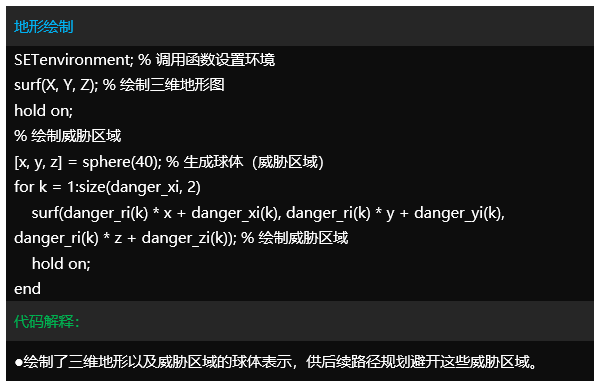
代码讲解
Tipps:仅对SingleUAVPlan\3维路径规划\runUAVABC4.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
MultiUAVPlan:多无人机路径规划
打开2DPathPlan文件夹运行system_ALL.m
1.二维路径规划的图
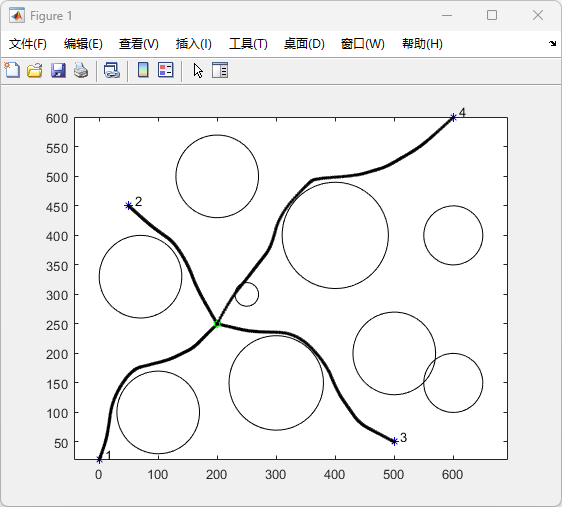
(1)黑色曲线:代表无人机从起点到终点的路径规划。这些路径似乎是通过某种优化算法(可能是人工蜂群算法)生成的。
(2)蓝色星号:标记了关键路径节点的坐标,分别标记为1、2、3、4,可能是无人机在路径规划过程中经过的重要位置。
(3)圆形:这些圆形可能表示环境中的障碍物,路径需要避开这些障碍物。
(4)绿色点:表示路径规划中的关键点,可能是无人机需要调整或校正路径的地方。
(5)数字标签:标注路径中的关键点和步骤编号,如1号点、2号点等。
2.算法结果
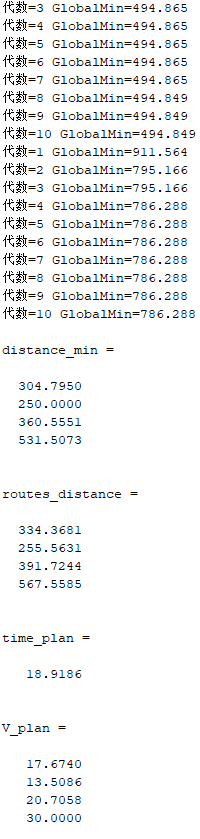
(1)代数n GlobalMin:显示算法在每一代中的全局最小值(GlobalMin)。这是指在每一次迭代中,算法找到的当前最优路径的适应度值。这个值逐代趋于稳定,表示算法收敛到了某个全局最优解。
(2)distance_min:列出了不同路径规划中最短的距离值。每个值代表无人机从一个起点到终点的最小距离。
(3)routes_distance:这是每条路径的具体距离,总结了不同路径的长度。
(4)time_plan:显示路径规划的总时间,单位应该是秒。这个时间表示算法计算最佳路径所花费的时间。
(5)V_plan:这是规划中的速度列表,表示无人机在不同路段的规划速度。
这两张图片展示了无人机路径规划的结果:包括路径的可视化表示、优化算法的运行结果、最小距离、路径长度、计算时间以及速度计划等信息。
打开3DPathPlan文件夹运行system_ALL.m
1.3D地形图
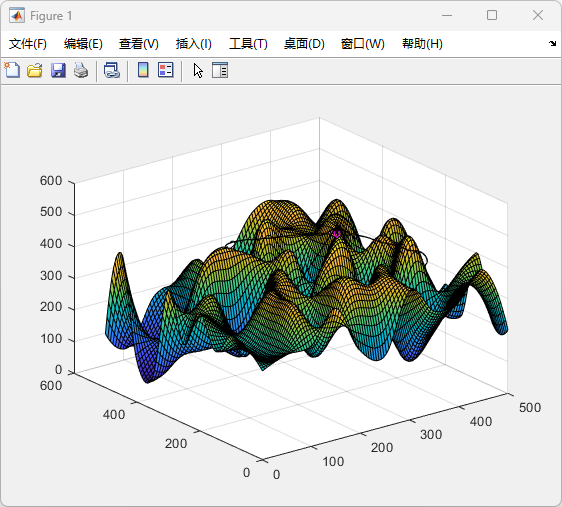
(1)三维网格图:这张图展示的是无人机路径规划中的三维环境。图中曲面代表了地形或环境中不同的高低起伏,无人机需要在这个复杂地形中规划最佳路径。
(2)颜色变化:网格的颜色变化表示高度的不同。较亮的部分可能是较高的区域,较暗的部分可能是低洼地带。无人机在规划路径时,需要考虑如何避开高峰或危险区域。
(3)紫色点:图中可能标记了一些关键点(如起点、终点或者路径中的中间节点)。这些点有助于说明无人机规划过程中需要经过的关键位置。
2.算法输出结果
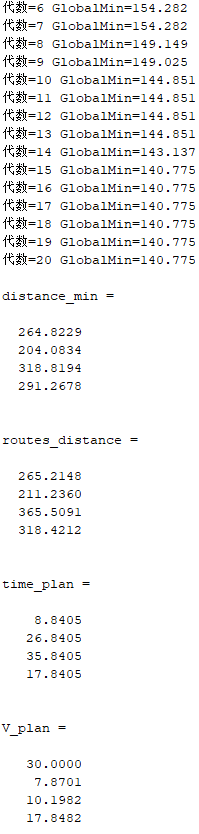
(1)代数n GlobalMin:显示算法在每一代中计算出的全局最小值(GlobalMin)。这个数值表示在当前代数中,算法找到的最优路径的适应度值。随着代数增加,最小值逐渐降低并趋于稳定,表明算法已经收敛,找到了较优的路径解。
(2)从第16代开始,最优解趋于140.775,这表明系统在这个点上找到了一个稳定的全局最小值。
(3)distance_min:这是不同路径规划中最短的路径距离,表示无人机从起点到终点需要走的最短路径长度(例如:264.8229、204.0834等)。
(4)routes_distance:这是每条规划路径的具体距离。与distance_min类似,但可能与不同路线的路径长度相关(例如:265.2148、211.2360等)。
(5)time_plan:这表示无人机路径规划的时间结果,单位可能是秒。不同的路径规划可能耗费不同的时间(例如:8.8405、26.8405等)。
(6)V_plan:规划中无人机的速度值,表示无人机在路径的各个部分的速度(例如:30.0000、7.8701等)。
总结:
(1)3D地形图展示了无人机需要在复杂的三维环境中规划路径,路径优化必须考虑高低差异。
(2)算法输出显示了路径规划的多项结果,包括最优路径的适应度、最短路径距离、不同路径的总长度、规划时间以及无人机的速度规划。
打开2维路径规划文件夹运行system_ALL.m
1.2D路径规划图
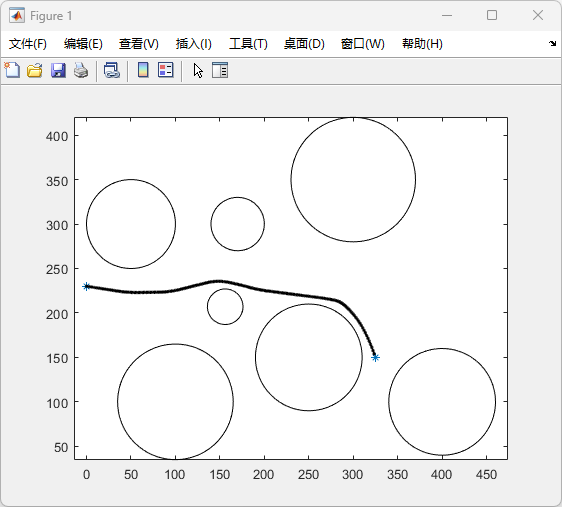
(1)黑色曲线:表示无人机从起点到终点的路径。曲线看起来相对简单,可能是在一个较少障碍物的环境中进行的规划。
(2)蓝色星号:标记了路径的起点和终点。
(3)圆形:代表规划环境中的障碍物,无人机在路径规划时需要避开这些障碍物。
(4)圆形障碍物的大小各不相同,模拟了复杂的环境。
2.算法输出结果
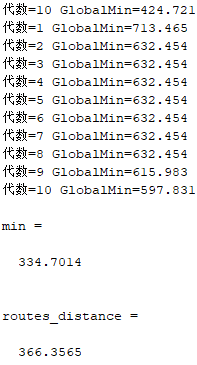
(1)代数n GlobalMin:显示了算法在每一代中找到的全局最小值。该值表示在当前迭代中,算法找到的最优路径的适应度值。
(2)可以看到,随着迭代次数增加,适应度值逐渐降低。开始时适应度为713.465,最终在第10代达到了424.721。这表明算法在进行路径优化,并逐渐收敛到一个更优的解。
(3)min:列出了无人机从起点到终点的最小距离(334.7014),这是算法优化后的最短路径。
(4)routes_distance:表示规划路径的总距离(366.3565),可能与障碍物的避让有关,因此距离稍大于最小距离。
总结:
(1)路径规划图展示了无人机避开多个圆形障碍物后的最终路径,且路径在环境中较为平滑。
(2)算法输出显示了算法在多次迭代中的全局最优解,最终找到了一条较短的路径,适应度从较高值逐渐收敛,说明路径的优化效果显著。
打开3维路径规划文件夹运行system_ALL.m
1.3D地形图
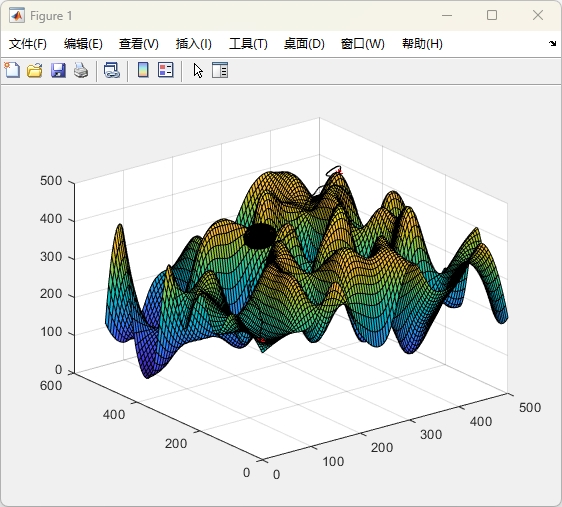
(1)三维网格图:展示了一个复杂地形的三维模型。无人机需要在这样的地形上进行路径规划,网格的起伏代表了地形的高度变化。
(2)红色标记:图中的红色点可能代表无人机路径中的关键点,或者是路径规划的起点和终点。无人机在地形中必须避开这些高低起伏的区域,找到最佳路径。
(3)颜色变化:颜色的渐变反映了不同高度的变化,较亮部分代表较高的区域,较暗部分代表低洼区域。路径的优化需要考虑这些地形起伏,避免高峰区域,找到最优路径。
2.算法输出结果
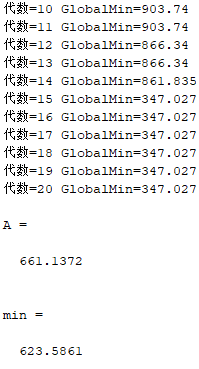
(1)代数n GlobalMin:显示了算法在每一代迭代中找到的全局最小值(GlobalMin)。这一数值代表当前代数中的最优路径的适应度值。可以看到,算法逐步迭代后从第15代开始收敛,最终最优解为347.027,说明算法在这个点上找到了较优的全局解。
(2)A = 661.1372:这个值可能代表当前路径的一些计算参数,具体含义可能和路径的某些属性相关,比如路径的复杂性或平均高度。
(3)min = 623.5861:这是无人机路径规划的最小值,表示最终无人机从起点到终点的最短路径长度。这是算法通过多次迭代优化后的最优路径。
总结:
(1)3D地形图展示了无人机需要应对的复杂地形,红点表示无人机的路径关键点,路径规划需要在这个起伏环境中找到最优解。
(2)算法输出显示了通过迭代,算法逐步收敛到一个稳定的全局最优解(GlobalMin = 347.027),并找到了一条最短路径(min = 623.5861),表明路径规划的优化效果显著。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件

文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)