

本研究设计并实现了一种基于Matlab图像处理的药片计数系统,旨在解决手动药片计数过程中可能出现的效率低下、误差较大等问题。
项目信息
编号:MOG-45
大小:16M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b、2024a
项目介绍
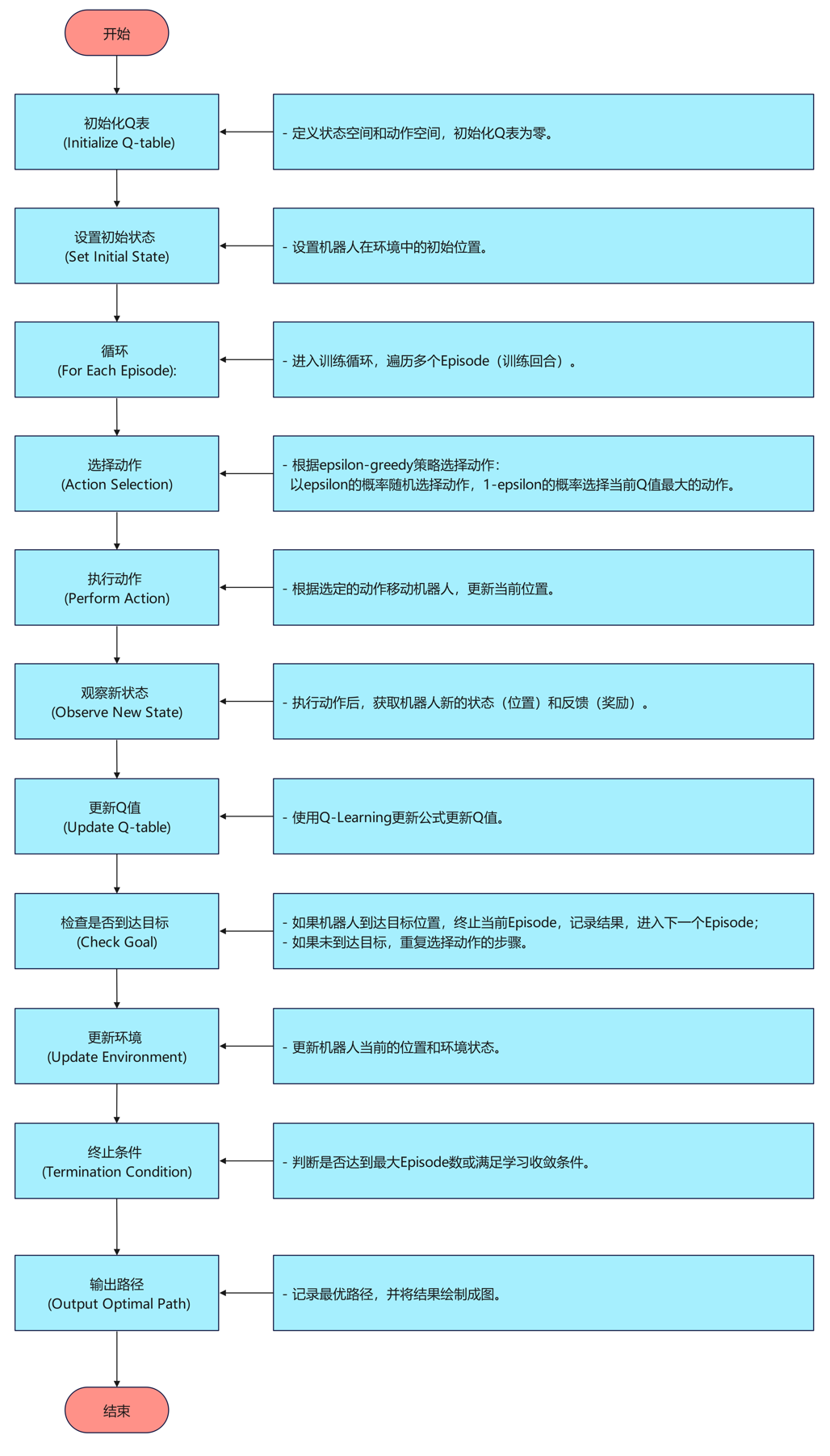
在自动化与智能机器人领域,路径规划是确保机器人能够高效自主行动的核心问题。本文提出了一种基于Q-Learning强化学习算法的路径规划方法,旨在通过自主学习找到最优路径,使机器人能够在复杂环境中避障并到达目标位置。为了验证该算法的有效性,我们在MATLAB环境下进行了仿真,设计了多种环境条件,测试了算法的适应性和收敛性。结果表明,基于Q-Learning的路径规划算法能够有效收敛,规划出最优路径,且在面对不同环境时具有较强的适应能力。本文的研究为智能机器人路径规划提供了一种新的解决方案。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
– 项目文档:写作流程
算法流程
代码讲解
Tipps:仅对PathPlanning.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。

运行效果
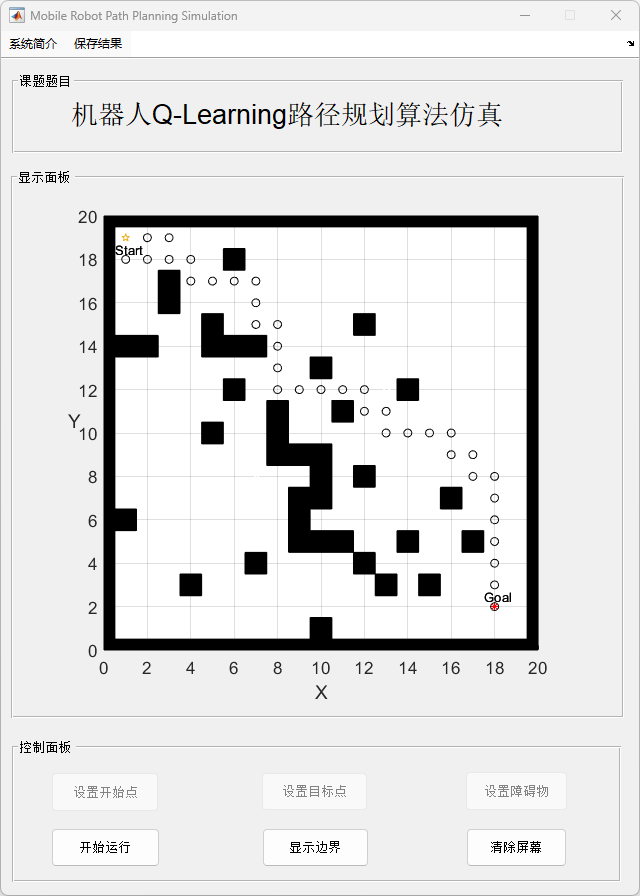
运行 PathPlanning.m
(1)主界面
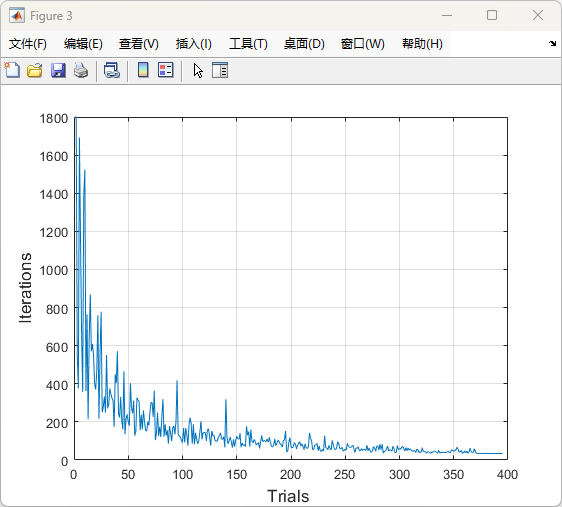
(2)图1(迭代次数 vs. 试验次数)
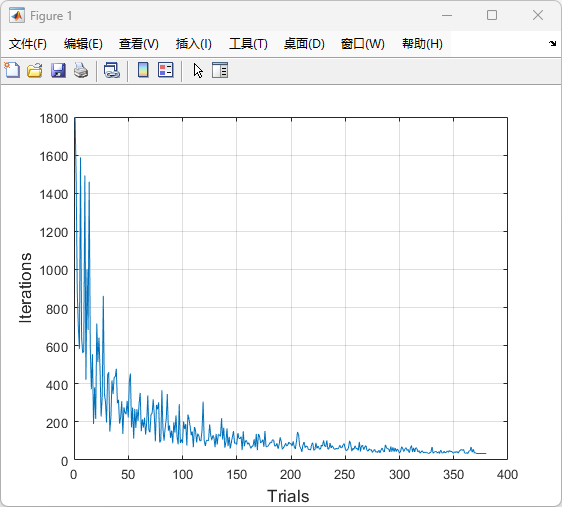
分析:该图显示了每次试验所需的迭代次数。最初,迭代次数较高,随着试验次数的增加,迭代次数逐渐减少。这表明系统或模型随着时间的推移在收敛或学习,随着更多的试验进行,每次试验所需的迭代次数减少。
(3)图2(单点图)
分析:此图显示了一个单一的数据点,可能代表一个孤立的数据点或某一特定试验下的条件。没有更多的上下文信息的情况下,它可能表示某一特定参数或一次性计算结果,且变化不大。
(4)图4(迭代次数 vs. 试验次数)
分析:显示了迭代次数与试验次数的关系。再次强调迭代次数随着试验次数的增加而减少,表明学习或优化过程的存在。
(5)图5(标准差 vs. 试验次数)
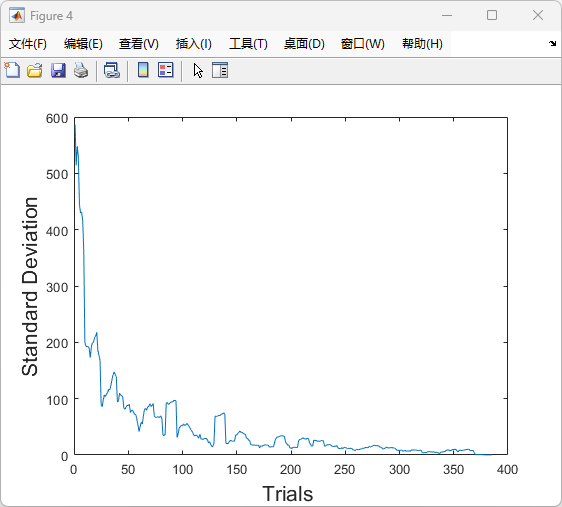
分析:该图表示某个变量在多次试验中的标准差。最初的高标准差表明初期存在显著的变化或不确定性。随着时间的推移,标准差逐渐减少,表明系统变得更加稳定,或者随着试验次数的增加,值逐渐收敛到一个一致的范围内。
些图表共同表明了一个学习或优化的过程,模型在初期表现出较大的波动(高迭代次数和高变化性),但随着更多的试验进行,系统变得更加高效和稳定。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
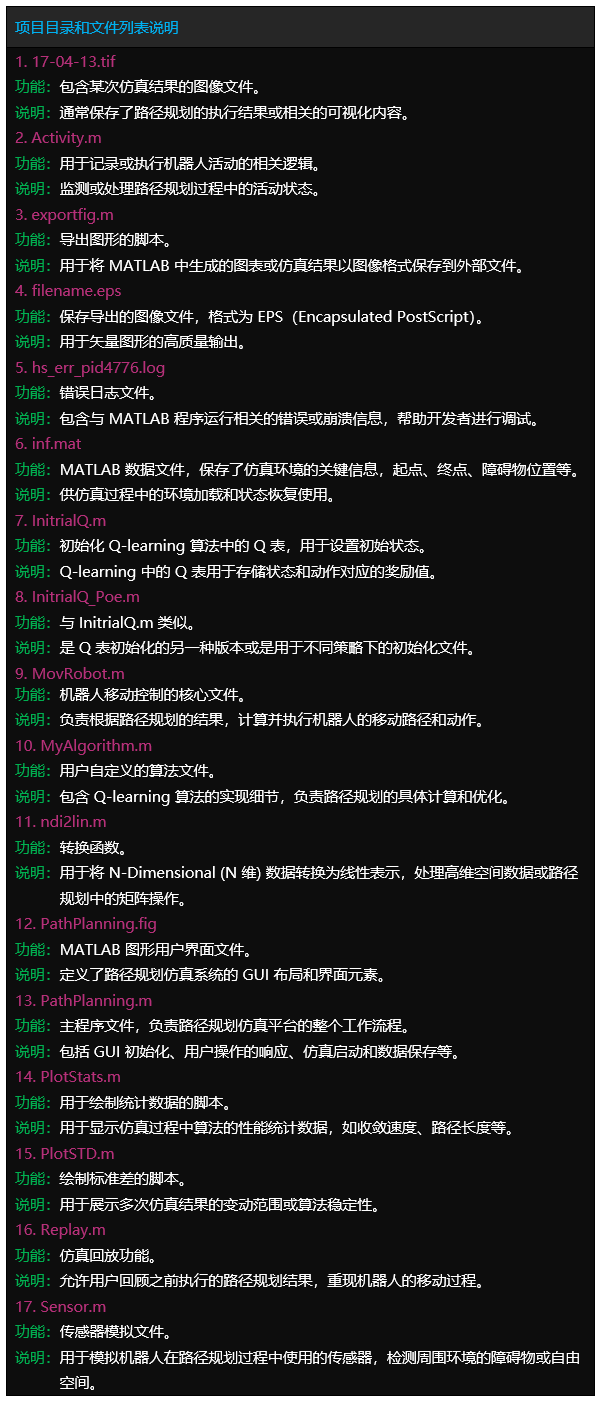
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)