
本研究提出了一种基于混合遗传算法(GA)和粒子群优化(PSO)的多无人机路径规划方法,以提高无人机在复杂环境下的路径规划效率和灵活性。
项目信息
编号:MOG-44
大小:6M
运行条件
Matlab开发环境版本:
– Matlab R2020b、2023b
项目介绍
本研究提出了一种基于混合遗传算法(GA)和粒子群优化(PSO)的多无人机路径规划方法,以提高无人机在复杂环境下的路径规划效率和灵活性。主要目的是通过结合GA和PSO的优点,生成适用于多无人机协同的最优路径。我们开发了包含多个关键模块的MATLAB实现,包括染色体初始化、适应度评估、交叉变异以及马尔可夫评估。实验结果表明,该方法能够显著提高路径规划的效率,并且能够在不同地形和障碍环境下生成合理的路径。
项目文档
Tipps:可以根据您的需求进行写作,确保文档原创!
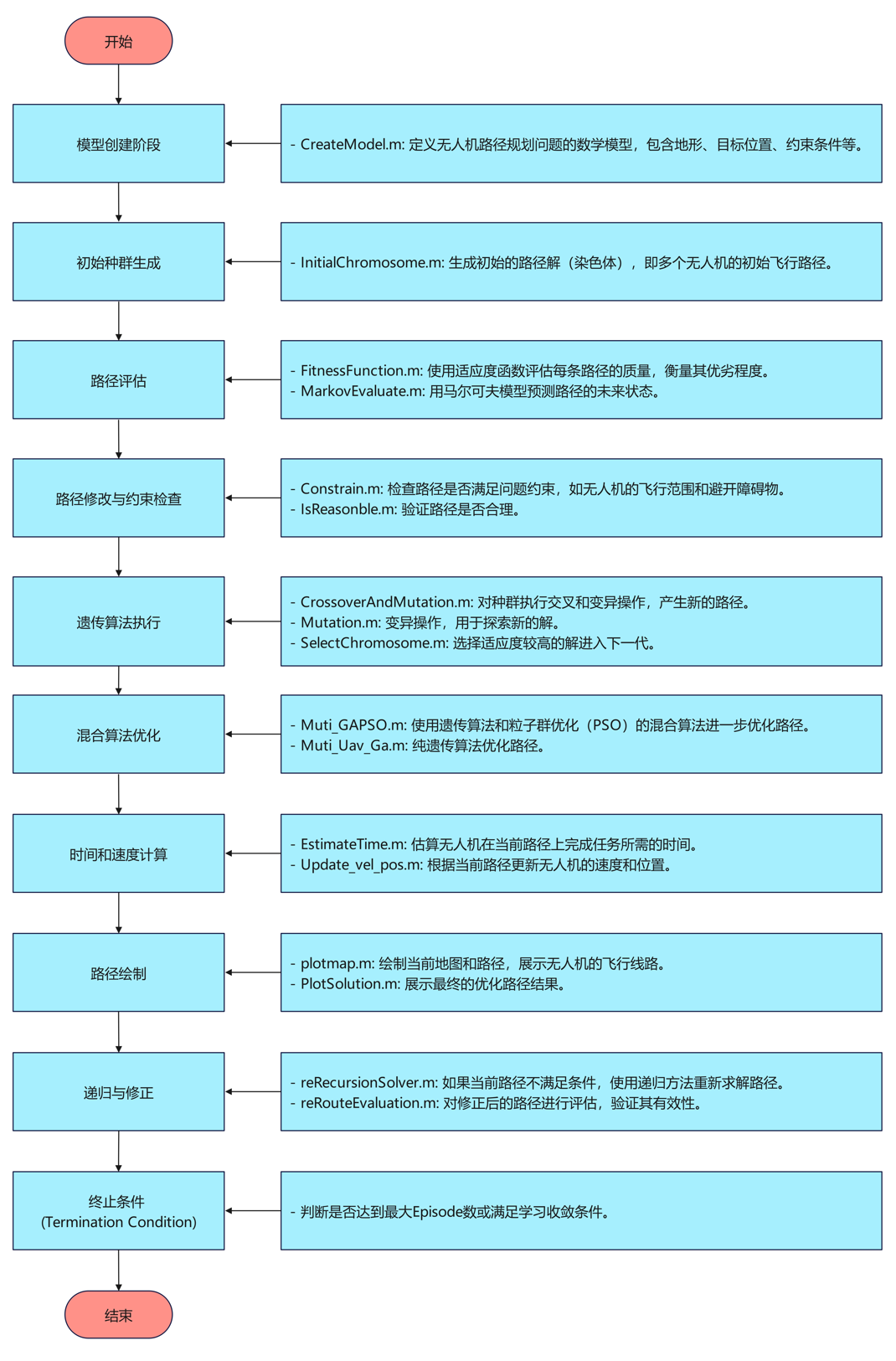
– 项目文档:写作流程
算法流程
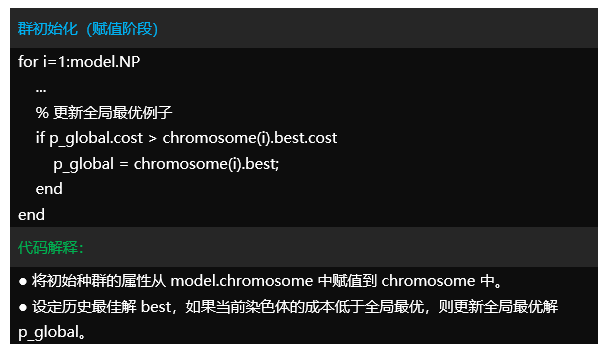
代码讲解
Tipps:仅对Muti_GAPSO.m部分代码简要讲解。该项目可以按需有偿讲解,提供后续答疑。
运行效果
运行 main.m
图1:显示了一个基于遗传算法(GA)生成的无人机路径规划结果。
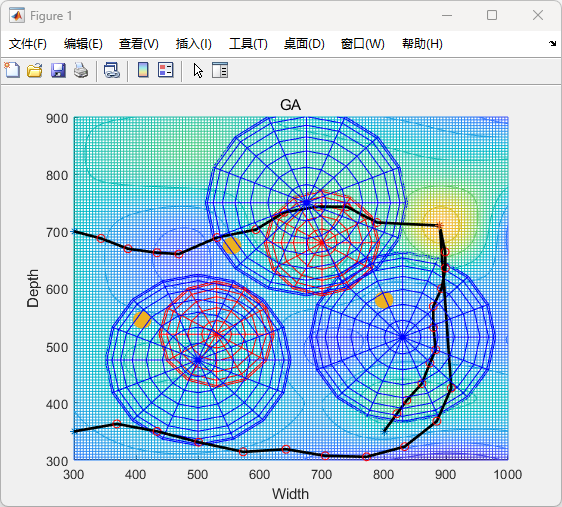
在图中:
(1)蓝色的网格代表了一个地形的地图,其中每个点的颜色代表不同的地形复杂性或危险程度。浅蓝色区域可能代表较为安全的区域,而黄色或红色区域可能是障碍物或危险区域。
(2)图中有三个红色和蓝色圆圈区域,表示的是目标区域或传感器范围等无人机需要关注的区域。
(3)黑色的线条代表无人机的路径,标出了从起点到终点的飞行路线。红色点标记了路径上的一些关键节点或路径的变化点。
(4)这个图可以用来展示遗传算法生成的路径是否成功避开了障碍物,并有效地覆盖了需要监控的区域。
图2:显示的是遗传算法(GA)在每次迭代中的“最佳值”演化过程,数值越小,表明路径的适应度越好:
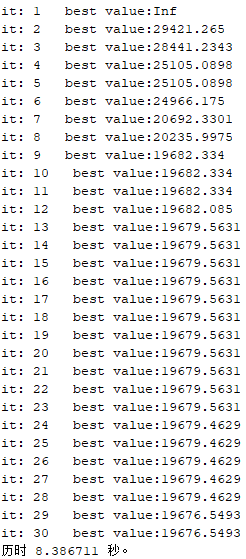
(1)每次迭代的“best value”表示在该迭代中找到的最佳解的适应度值。第一轮的值是无穷大(Inf),因为可能没有找到合适的解。
(2)随着迭代次数增加,适应度值逐渐降低,表明算法在不断优化路径。
(3)在第13次迭代后,适应度值趋于稳定,约为19679.5631。这表明算法在这时已经找到了接近最优的解。
(4)最终的适应度值保持在19676.5493左右。
通过这两个图的结合,我们可以看到遗传算法经过30次迭代后,找到了一条优化的路径,同时该路径能有效地避开障碍物并完成任务。
远程部署
Tipps:购买后可免费协助安装,确保运行成功。
– 远程工具:Todesk 、向日葵远程控制软件
– 操作系统:Windows OS
项目文件
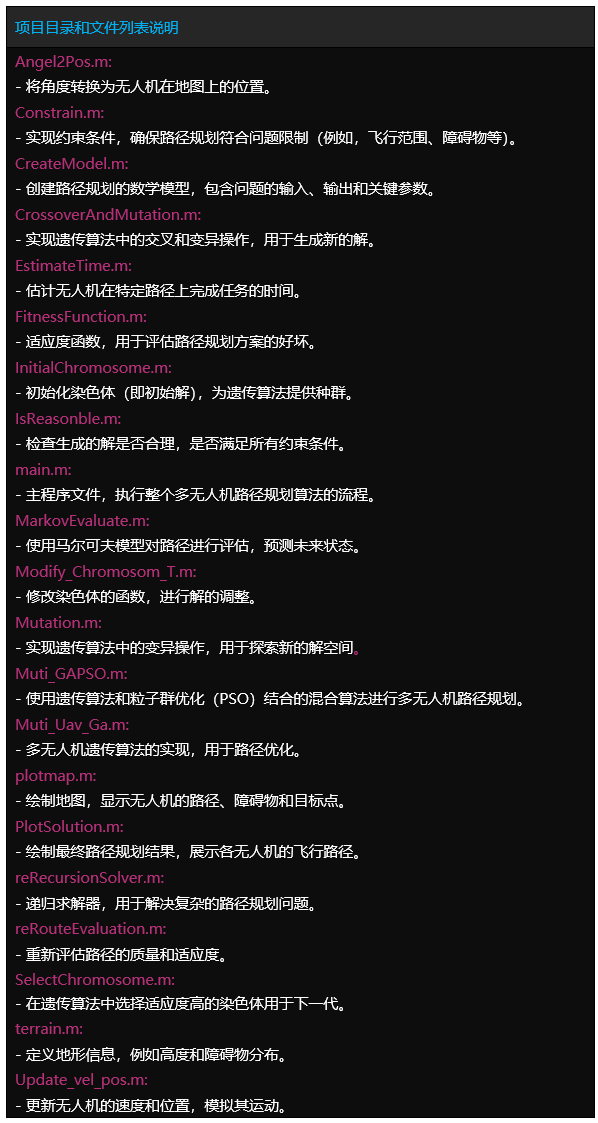
文件目录
Tipps:完整项目文件清单如下:
项目目录
– 1.Code (完整代码:确保运行成功)
– 2.Result (运行结果:真实运行截图)
– 3.Demo (演示视频:真实运行录制)
评论(0)